2. PERFORMANCE SPECIFICATIONS
2 − 3
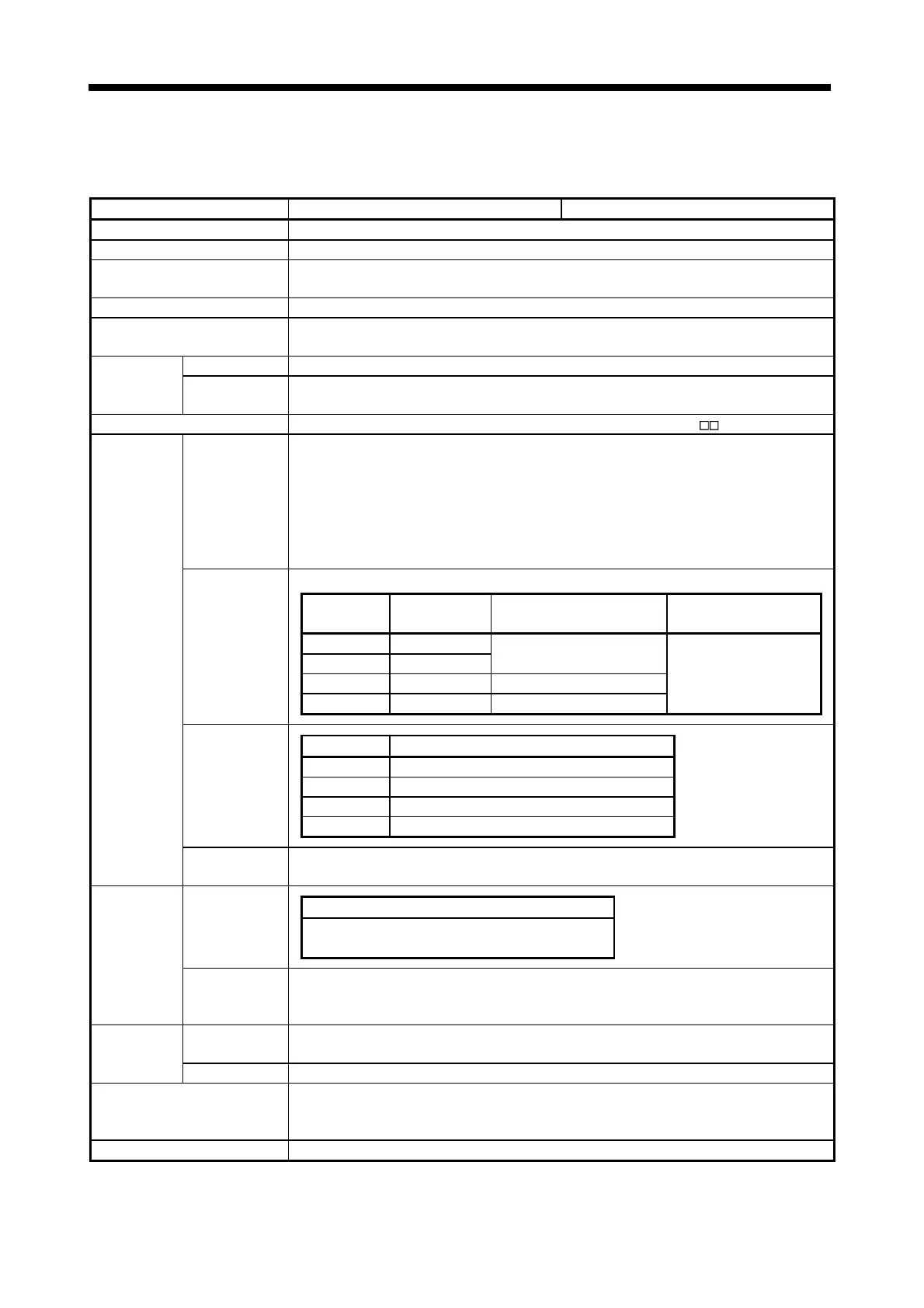
2.2 PCPU Performance Specifications
Table 2.2 PCPU Performance Specifications
Item A273UHCPU A173UHCPU(-S1)
Number of control axes 32 axes (simultaneous: 2 to 4 axes, independent: 32 axes)
Interpolation functions Linear interpolation (max. 4 axes), circular interpolation (2 axes)
Control modes
PTP(point to point), speed control, speed/position control, fixed-pitch feed, constant-speed
control, position follow-up control, speed switching control, high-speed oscillation control
Control units mm • inch • degree • PULSE
Programming language
Dedicated instructions (sequence ladders + servo programs)
SFC programming of servo programs is also possible.
Capacity 14334 steps
Motion
program
Number of points
for positioning
Approx. 100 points/axis
(These values vary depending on the programs. Positioning data can be designated indirectly.)
Program setting method Setting with an IBM PC A30TU-E/A31TU-E (SV13 only), running the GSV
PE software
PTP : Selection of absolute data method or
incremental method
Speed/positioning control, fixed-pitch feed : Incremental method
Constant-speed control, speed switching
control
: The absolute method and incremental method
can be used together
Method
Position follow-up control, high-speed
oscillation control
: Absolute data method
Commands can be selected for each axis.
Control Unit Command Unit Address Setting Range
Travel Value Setting
Range
mm × 10
−
1
µm
inch × 10
−
5
inch
−2147483648 to 2147483647
degree × 10
−
5
degree 0 to 35999999
PULSE × 1 PULSE −2147483648 to 2147483647
0 to ±2147483647
Position
commands
Control Unit Speed Setting range
mm 0.01 to 6000000.00 (mm/min)
inch 0.001 to 600000.00 (inch/min)
degree 0.001 to 2147483.647 (degree/min)
(Note-1)
PULSE 1 to 10000000 (PLS/s)
(Note-1)
Speed command
(command unit)
Positioning
High speed
oscillation function
One specified axis can be reciprocated in sine waveform.
Acceleration-fixed acceleration/deceleration
Acceleration time: 1 to 65535ms
Deceleration time: 1 to 65535ms
Automatic
trapezoidal
acceleration/
deceleration
Acceleration/
deceleration
control
S-curve
acceleration/
deceleration
S-curve ratio setting : 0 to 100%
Backlash
compensation
(0 to 65535) × position command unit (units converted to PULSE : 0 to 65535 PULSE)
Compensation
Electronic gear Compensation function for error in actual travel value with respect to command value
Zeroing function
When an absolute position system is not used : Selection of proximity dog type or count type
When an absolute position system is used : Selection of data set type, proximity dog type or
count type
JOG operation function Provided

 Loading...
Loading...





