4. PARAMETERS FOR POSITIONING CONTROL
4 − 3
4.2.1 Setting the number of pulses per revolution / travel value per revolution / unit magnification
This section explains how to set the number of pulses per revolution, the travel
value per revolution, and the unit magnification.
(1) Setting method 1
(a) Finding the smallest position resolution (∆l).
The smallest position resolution (∆l) is determined by the travel value per
revolution (∆S) and the number of encoder feedback pulses (P
f
).
1=
Pf
S
(b) Finding the unit magnification (A
M
)
Find the unit magnification on the basis of ∆l determined as described in (a)
above. However, make sure that the smallest command unit is not smaller
than ∆l.
(For unit setting [mm])
∆
∆∆
∆l found in (a) [mm] Smallest Command Unit [mm] Unit Magnification (AM
)
0.00001 < ∆l ≤ 0.0001 0.0001 1
0.0001 < ∆l ≤ 0.001 0.001 10
0.001 < ∆l ≤ 0.01 0.01 100
0.01 < ∆l ≤ 0.1 0.1 1000
[Example] Assuming that the travel value per revolution (∆S) is 10 [mm] and the
number of encoder feedback pulses (P
f
) is 8192 [PLS/rev]:
1=
10[mm]
8192[PLS/rev]
=0.00122 0.001<0.00122<0.01
This means that the smallest command unit is 0.01 [mm] and the unit
magnification (A
M
) is 100.
Therefore, 0.01 [mm] units can be specified in commands.
(c) Finding the travel value per revolution (A
L
).
If the unit magnification (A
M
) is "1", the travel value per revolution is the
value of A
L
, unchanged. If the unit magnification (A
M
) is a value other than
"1", the travel value per revolution is the product of A
L
and A
M
.
[Example] Assume that the travel value per revolution is 10 [mm] and the unit
magnification is 100:
L
=
10000.0[ m]
100
=100.0[ m]
Accordingly, 100.0 [
µ
m] is set as the travel value per revolution (A
L
) in this
case.
(d) Number of pulses per revolution (A
P
)
Set the number of feedback pulses per revolution of the encoder.
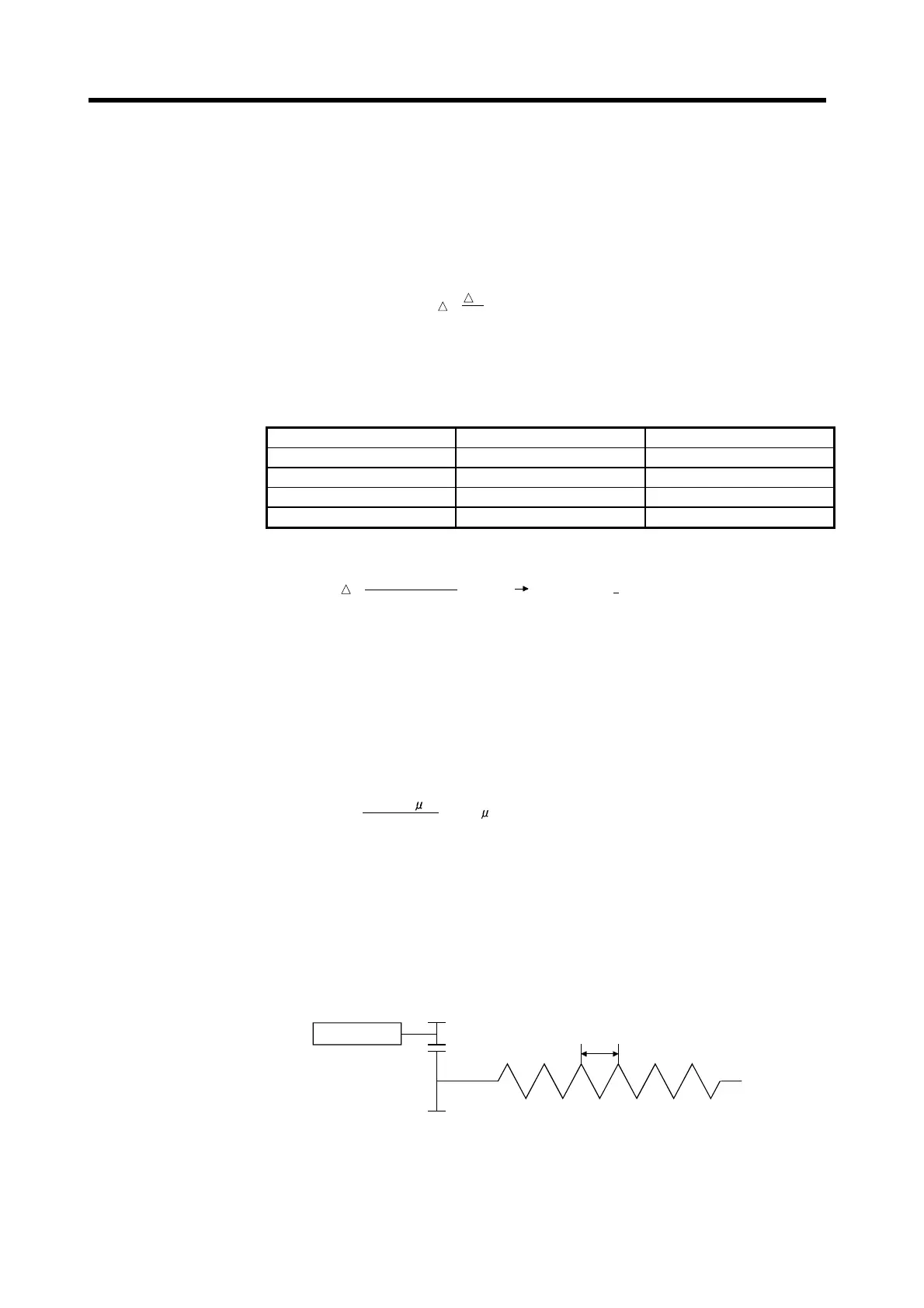
(e) The number of pulses per revolution, travel value per revolution, and unit
magnification for the example configuration shown here are calculated
below.
1
25
10[mm]
Gear ratio = Z
1
: Z
2
=1 : 25
Number of feedback pulses=8192[PLS/rev]
Ball screw pitch = 10[mm]
Servo motor

 Loading...
Loading...





