7. POSITIONING CONTROL
7 − 141
7.21 Home Position Return
(1) Use zeroing at power on and other times where confirmation that axis is at the
machine home position is required.
(2) The following three methods of home position return are available:
• Proximity dog method Used when not using an absolute position
• Count method system
• Data set method..........................Recommended for an absolute-position
system
(3) To carry out zeroing, the zeroing data must be set for each axis.
7.21.1 Zeroing data
The zeroing data is the data required to carry out zeroing.
Set the zeroing data from a peripheral device.
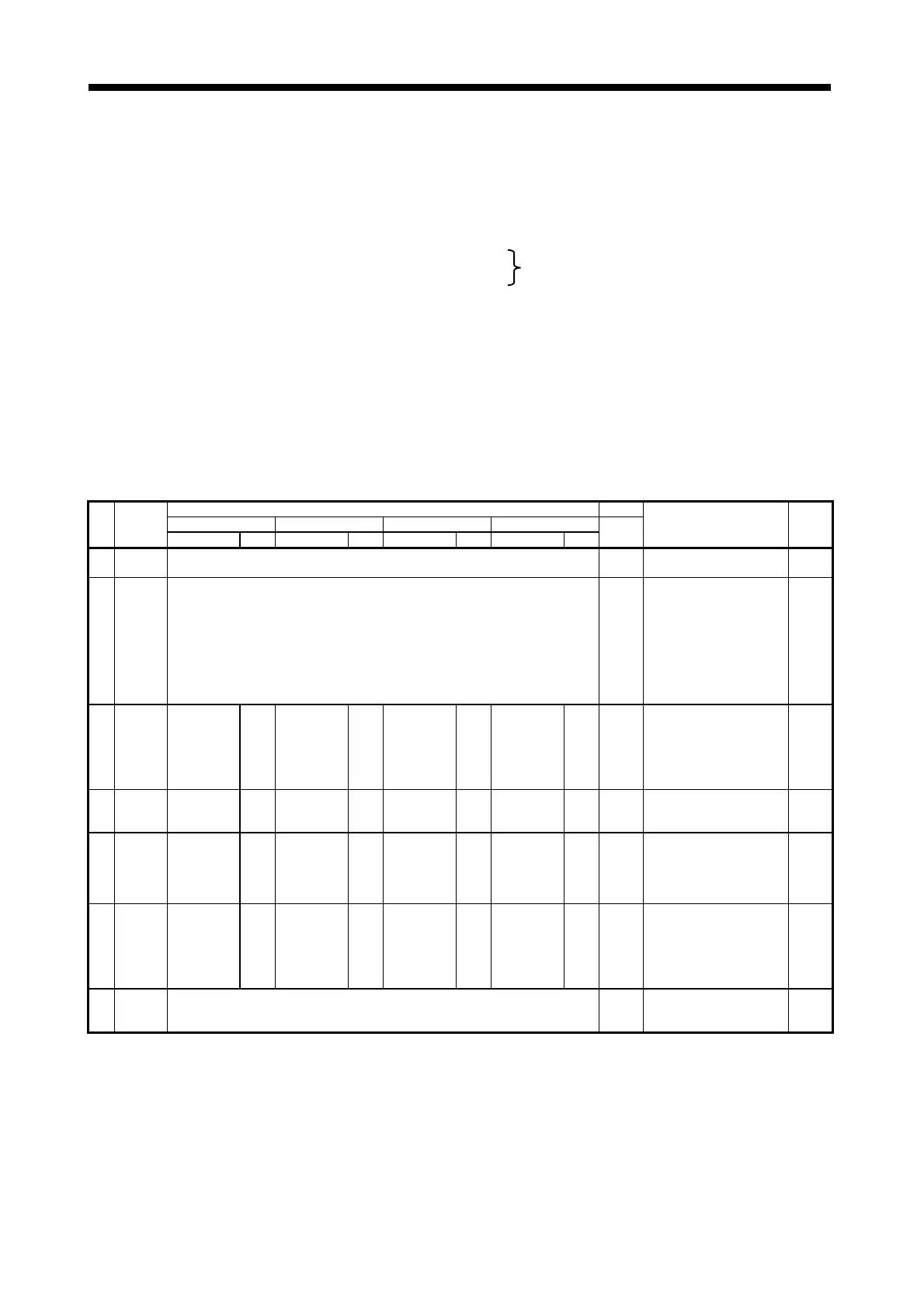
Table 7.3 Table of Home Position Return Data
Setting Range Default
mm inch degree PULSENo. Item
Setting Range Units Setting Range Units Setting Range Units Setting Range Units
Initial
Value
Remarks
Explan-
atory
Section
1
Zeroing
direction
0: reverse direction (decreased address)
1: forward direction (increased address)
0 • Sets the direction for zeroing. −
2
Zeroing
method
0: near-zero point dog method
1: count method
2: data set method
0
• Sets the zeroing method.
• The proximity dog method or
count method is recom-
mended for a servo amplifier
which does not support ab-
solute data, and the data set
method is recommended for
a servo amplifier which sup-
ports absolute data.
−
3
Home
position
address
–2147483648
to 2147483647
×10
-1
µ
m
–2147483648
to 2147483647
×10
-5
inch
0 to 35999999
×10
-5
degree
–2147483648
to 2147483647
PLS 0
• Sets the current value of the
home position after zeroing.
• It is recommended that the
home position address is set
at the stroke limit upper limit
or lower limit.
−
4
Zeroing
speed
0.01 to
6000000.00
mm/
min
0.001 to
600000.000
inch/
min
0.001 to
2147483.647
degree
/
min
1 to 10000000 PLS/s 1 • Sets the speed for zeroing. −
5
Creep
speed
0.01 to
6000000.00
mm/
min
0.001 to
600000.000
inch/
min
0.001 to
2147483.647
degree
/
min
1 to 10000000 PLS/s 1
• Sets the creep speed (low
speed immediately before
stopping after deceleration
from zeroing speed) after the
proximity dog.
−
6
Travel
value after
proximity
dog
0 to
214748364.7
µ
m
0 to
21474.83647
inch
0 to
21474.83647
degree
0 to
2147483647
PLS −
• Sets the travel value after the
proximity dog for the count
method.
• Set more than the decelera-
tion distance at the zeroing
speed.
7.21.1
(1)
7
Parameter
block
setting
1 to 64 1
• Sets the parameter block to
use for zeroing (see Section
4.4).
−

 Loading...
Loading...





