7. POSITIONING CONTROL
7 − 17
7.1.7 Acceleration and deceleration processing
Acceleration and deceleration are processed by the two methods described below.
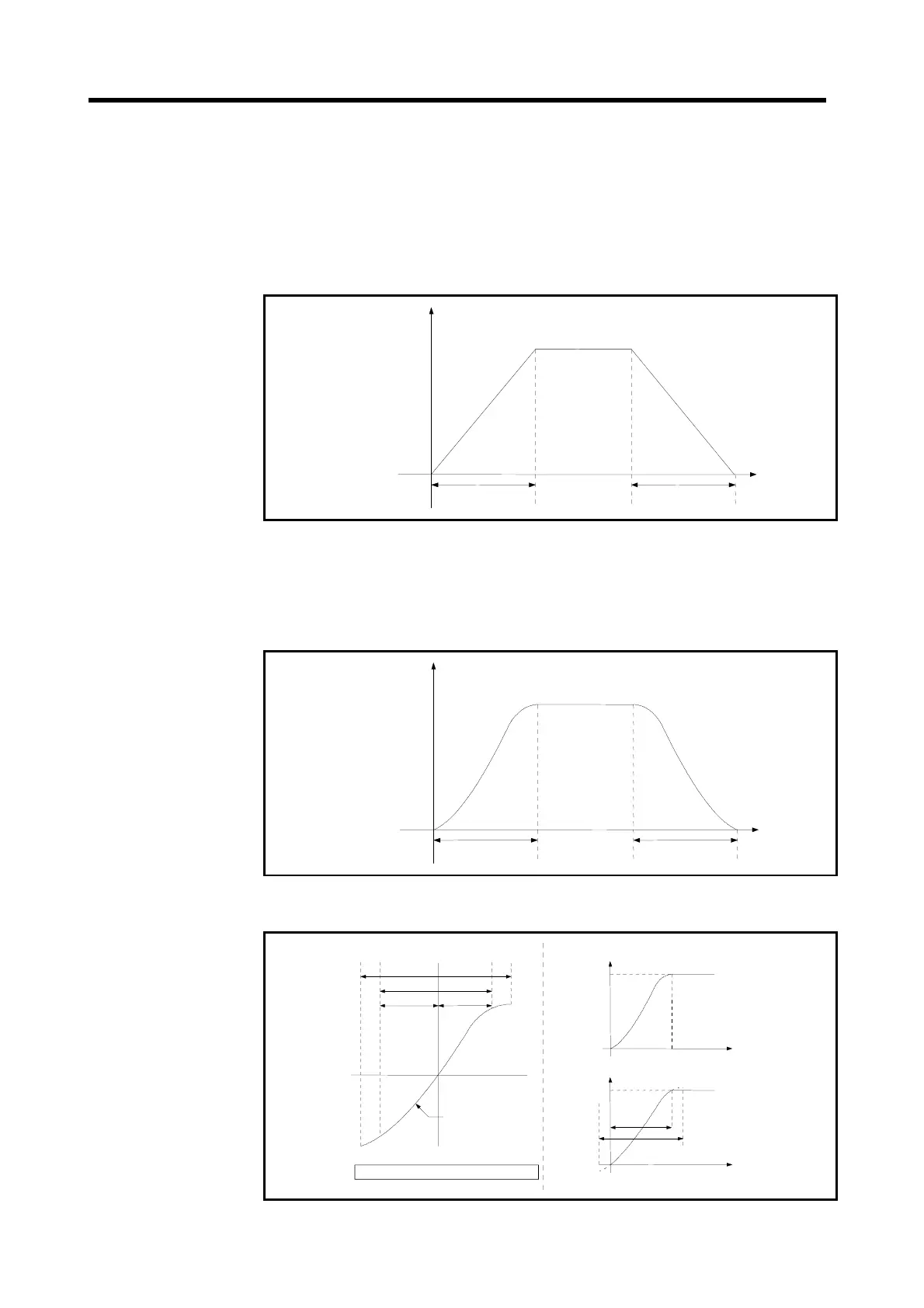
(1) Trapezoidal acceleration and deceleration processing
The conventional linear acceleration and deceleration processing. The
acceleration and deceleration graph resembles a trapezoid, as shown in the
diagram below.
The acceleration and deceleration times are set automatically.
V
t
0
Positioning speed
Time
Acceleration time Deceleration time
(2) S-curve acceleration and deceleration processing
The S-curve ratio is set as a parameter to provide gentler acceleration and
deceleration than trapezoidal processing. The acceleration and deceleration
graph is sinusoidal, as shown in the diagram below.
Set the S-curve ratio in the parameter block (see Section 4.4.2) or in a servo
program.
V
t
0
Positioning speed
Time
Acceleration time Deceleration time
As shown in the diagram below, the S-curve ratio sets the part of the sine curve
used to produce the acceleration and deceleration curve.
t
(Example)
Positioning
speed
VA
B
B/2 B/2
Sine curve
t
b
a
Positioning
speed
V
S- curve ratio 100%
S- curve ratio 70%
S- curve ratio
=
B/A
×
100%
b/a
=
0.7

 Loading...
Loading...





