4Basic operations
Programming 4-89
4.7.1 Creating the program
(1) Deciding the operation order
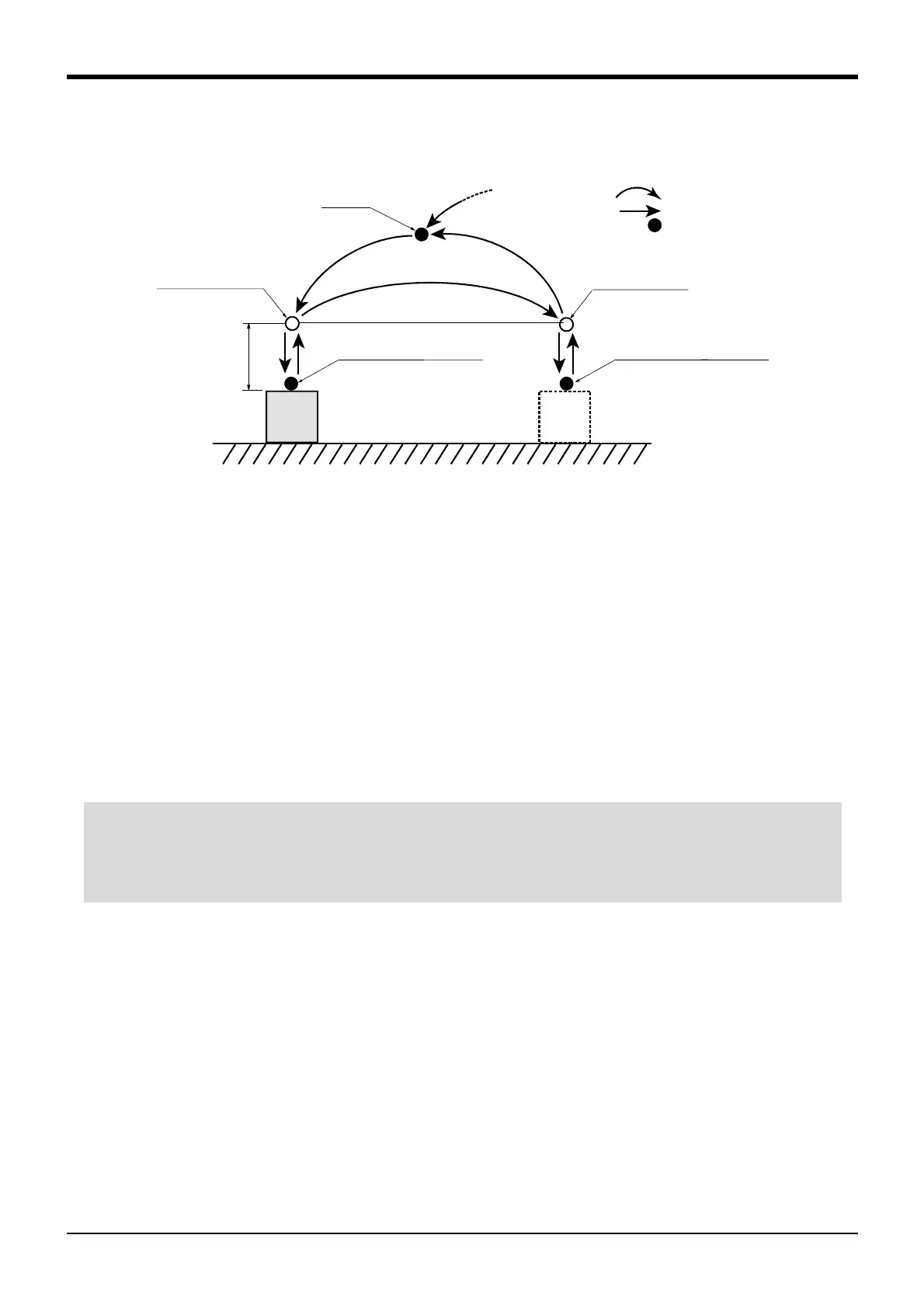
Fig.4-11 : Deciding the operation order
2
0
m
m
(3) (7)
(5) (9)
(
1
0
)
(4) Hand close
Position to grasp workpiece
Wait position
(6)
(
2
)
(
1
)
(8) Hand open
Position to release workpiece
:Joint movement
:Linear movement
:Teaching position
Upward position to
grasping workpiece
Upward position to
release workpiece
Start
(1) Move to wait position (joint movement).
(2) Move to 20mm upward workpiece (joint movement).
(3) Move to position to grasp workpiece (linear movement).
(4) Grasp workpiece (hand close).
(5) Move 20mm upward (linear movement).
(6) Move to 20mm upward position to release workpiece
(joint movement).
(7) Move to position to release workpiece (linear movement).
(8) Release workpiece (hand open).
(9) Move 20mm upward (linear movement).
(10) Move to wait position (joint movement).
End
◇◆◇ Joint movement and linear movement ◇◆◇
The operation for which the robot movement path is not designated in particular is the "joint movement". The
operation for which the movement path is designated as linear is "linear movement".
If the robot could interfere with the peripheral devices, such as the workpiece, when moving to grasp or release
the workpiece, designate "linear movement" to prevent any interference.
 Loading...
Loading...



