4Basic operations
Programming 4-91
(3) Describing and creating the program
■ Convert the target robot operations and work into commands.
Refer to the separate manual "Instruction Manual: Detailed explanations of functions and operations" for details
on the commands.
Table 4-2 : Commands used
Note) Upward movement is designated at a position along the Z axis of the TOOL coordinate system, and the
direction is designated with the + and - signs. Confirm the Z axis direction of the TOOL coordinate system.
Then, designate the correct sign (direction) that matches the robot being used. The example of designation
above is an example using a horizontal multiple-joint type robot.
■ Program the converted commands
Fig. 4-13 : Describing the program
Target operation and work Command Example of designation
Joint movement Mov Move to position variable PWAIT Mov PWAIT
Move to 20mm upward position variable
PGET
Mov PGET,+20
Note)
Linear movement Mvs Move to position variable PGET Mvs PGET
Move to 20mm upward position variable
PGET
Mvs PGET,+20
Note)
Hand open Hopen Open hand 1 Hopen 1
Hand close Hclose Close hand 1 Hclose 1
Wait Dly Wait 1 second Dly 1.0
End End End the program End
Start
(1) Move to wait position (joint movement) ...................................................................1 Mov PWAIT
(2) Move to 20mm upward workpiece (joint movement)...........................................2 Mov PGET,+20
Note)
(3) Move to position to grasp workpiece (linear movement)...................................3 MVS PGET
(4) Grasp workpiece (hand close).......................................................................................4 HClose 1
(5) Waits for 1 seconds...........................................................................................................5 Dly 1.0
(6) Move 20mm upward (linear movement).....................................................................6 MVS PGET,+20
Note)
(7) Move to 20mm upward position to release workpiece (joint movement) ...7 Mov PPUT,+20
Note)
(8) Move to position to place workpiece (linear movement)...................................8 MVS PPUT
(9) Release workpiece (hand open)....................................................................................9 HOpen 1
(10) Waits for 1 seconds ........................................................................................................10 Dly 1.0
(11) Move 20mm upward (linear movement)..................................................................11 MVS PPUT,+20
Note)
(12) Move to wait position (joint movement).................................................................12 Mov PWAIT
End...................................................................................................................................................13 End
Hand ・・・・ Up to four hands can be installed. However, in the above program, the 1st hand connected to
hand 1 is the target.
2
0
m
m
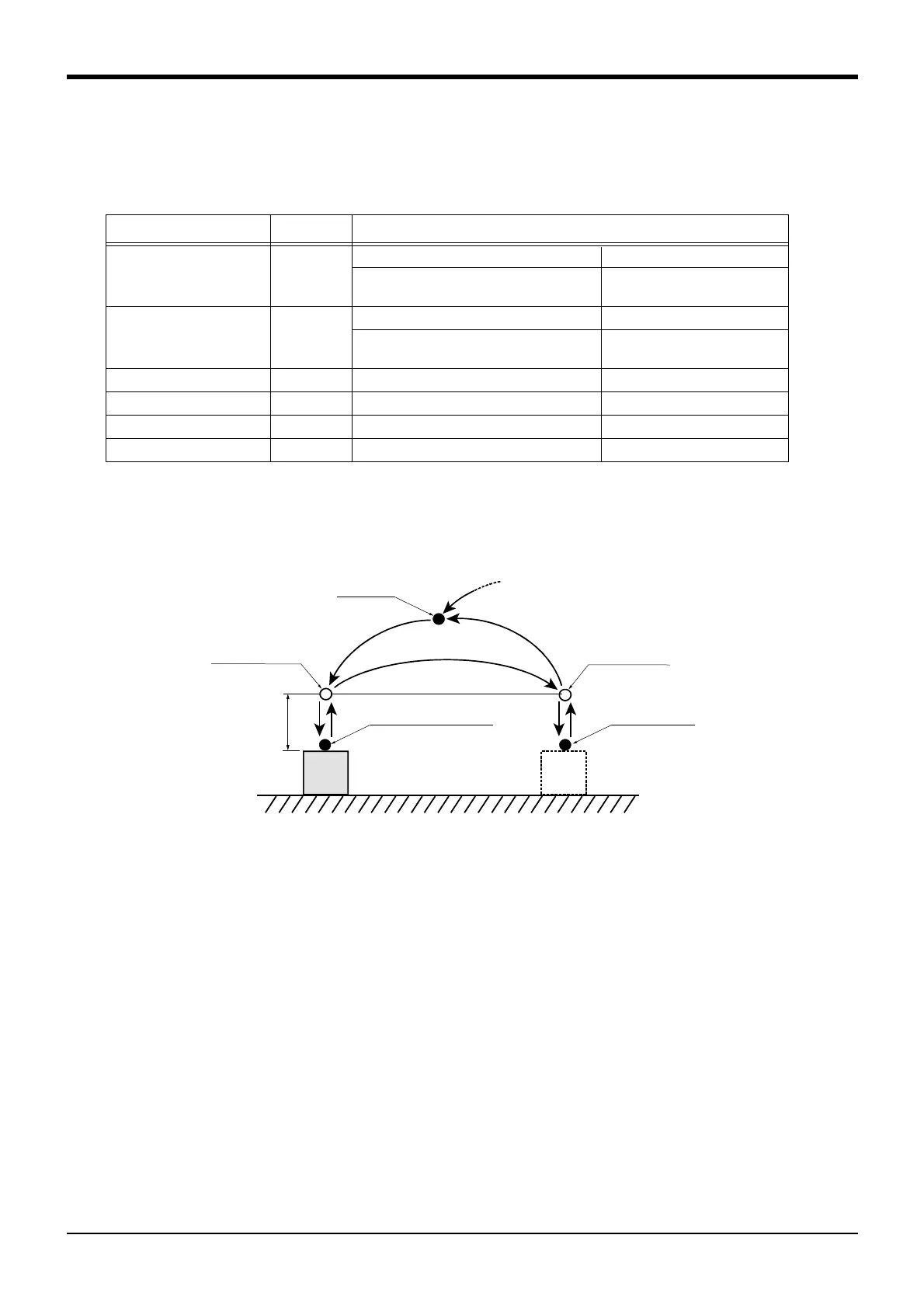
Position to grasp workpiece
(PGET)
Position to release
workpiece
(PPUT)
Wait position
(PWAIT)
Upward position to
grasping workpiece
Upward position to
release workpiece
 Loading...
Loading...



