Chapter 10 Troubleshooting
10–8
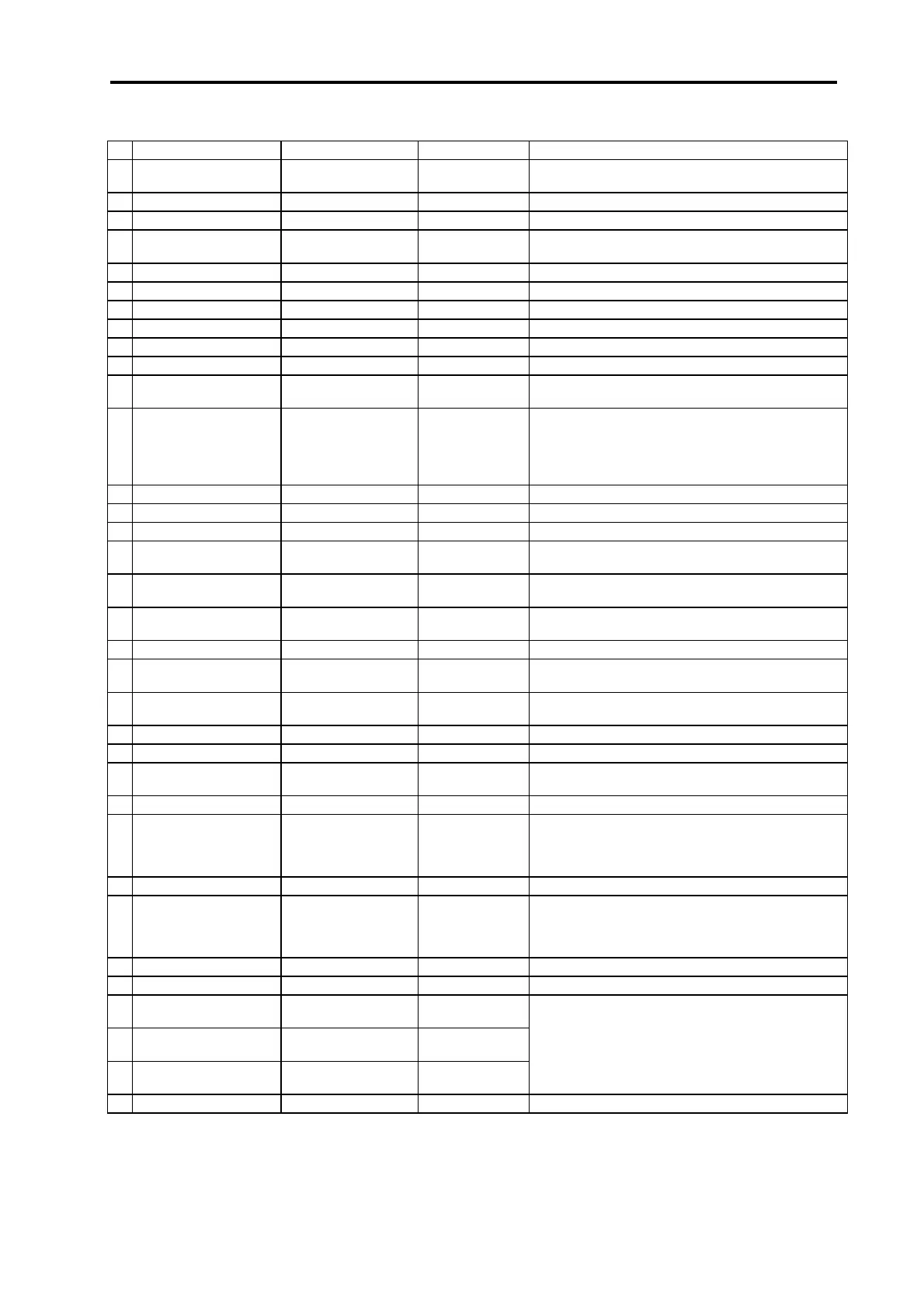
10-3-3 Alarm and warning deceleration method and reset method
No.
Name Deceleration method Reset method Explanation
10 Undervoltage Deceleration control PR
When the power is cut off, the dynamic brakes may be
switched to.
13 Software processing error Dynamic PR
17 A/D converter error Dynamic PR
18
Detector, initial
communication error
Initial error PR
22 LSI error Dynamic AR
24 Ground fault Dynamic PR
25 Absolute position data lost Initial error AR
2B Detector, CPU error Initial error AR
2C Detector, LED error Deceleration control PR
2D Detector, data error Dynamic PR
2F
Detector, communication
error
Dynamic PR
30 Over-regeneration Deceleration control PR
PR reset is not possible when the regeneration level is 50%
or more.
Do not reset (AR) forcibly by turning off the amplifier.
If AR is carried out at 50% or more, 80% will be set the
next time the power is turned ON.
31 Overspeed Deceleration control PR
32 Power module overcurrent Dynamic PR
33 Overvoltage Dynamic PR
34
CNC communication,
CRC error
Deceleration control PR
35
CNC communication, data
error
Deceleration control PR
36
CNC communication,
transmission error
Deceleration control PR
37 Initial parameter error Initial error PR
38
CNC communication,
protocol error 1
Deceleration control PR
39
CNC communication,
protocol error 2
Deceleration control PR
3A Overcurrent Dynamic PR
3C Regeneration circuit error Dynamic AR
46 Motor overheat Deceleration control NR
NR and PR reset cannot be carried out when the motor is
overheated.
4F Instantaneous stop Deceleration control NR
50 Overload 1 Deceleration control NR
NR and PR reset is not possible when the load level is
50% or more. Do not reset (AR) forcibly by turning off the
amplifier. If AR is carried out at 50% or more, 80% will be
set the next time the power is turned ON.
51 Overload 2 Dynamic NR
52 Excessive error 1 Deceleration control NR
A step stop is carried out in deceleration control. The
deceleration control time constant is meaningless. (C1 and
subsequent versions. The dynamic method is fixed in the
C0 version.)
53 Excessive error 2 Dynamic NR
54 Excessive error 3 Dynamic NR
58
Collision detection method
1, G0
Deceleration control NR
59
Collision detection method
1, G1
Deceleration control NR
5A
Collision detection method
2
Deceleration control NR
After the collision is detected, the machine will decelerate
to a stop at 80% of the motor's maximum torque.
88 Watch dog Dynamic AR
 Loading...
Loading...
