Chapter 11 Selection
11–13
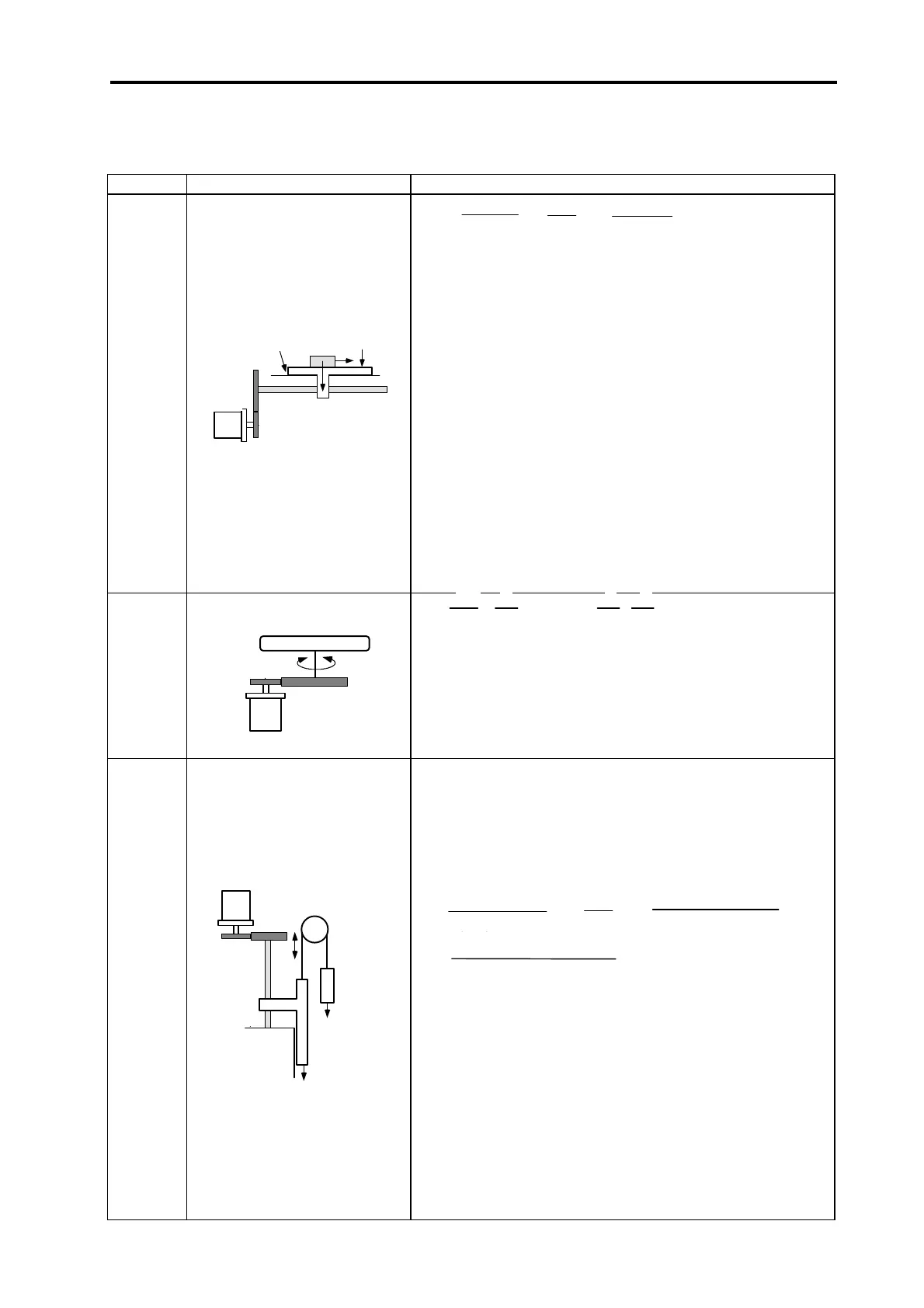
11-5 Motor shaft conversion load torque
The main load torque calculation expressions are shown below.
Type Mechanism Calculation expression
Linear
movement
W
1
Z
2
FC
F
0
η
Servo-
motor
TL =
F in the above expression is obtained from the lower expression
when the table is moved as shown on the left.
F = Fc + µ (W · g · F0)
Rotary
movement
Servomotor
T
LO
Z1 Z2
TL = · · TLO + TF = · · TLO + TF
Vertical
movement
W2
1
1/n
Servomotor
Guide
Counter-
weight
Load
When rising
TL = TU + TF
When lowering
TL = –TU · η
2
+ TF
TU =
TF =
F· △S
3
V
N
F
2×10
3
πη
Fc : Force applied on axial direction of moving section (N)
F0 : Tightening force on inner surface of table guide (N)
W : Total weight of moving section (kg)
g : Gravitational acceleration (m/sec
2
)
µ : Friction coefficient
TL : Load torque (N·m)
F : Force in axial direction of linear motion
machine (N)
η : Drive system efficiency (%)
V : Speed of linear operation object (mm/min)
N : Motor speed (r/min)
∆S: Object movement amount per motor rotation (mm)
Z
1
, Z
2
: Deceleration ratio
TL : Load torque (N·m)
TLO : Load torque on load shaft (N)
TF : Motor shaft conversion load friction torque (N·m)
η : Drive system efficiency
Z
1
, Z
2
: Deceleration ratio
n : Deceleration rate
TL : Load torque (N·m)
TU : Unbalanced torque (N·m)
TF : Friction torque on moving section (N·m)
1
n
1
η
Z
1
Z
2
1
η
V
N
(W
1
− W
2
) ·
g
(W
1
– W
2
) · g ·
△S
3
µ · (W
1
+ W
2
) · g · △
S
W
1
: Load weight (kg)
W
2
: Counterweight weight (kg)
η : Drive system efficiency
g : Gravitational acceleration = 9.8 (m/sec
2
)
V : Speed of linear operation object (mm/min)
N : Motor speed (r/min)
△S: Object movement speed per motor rotation (mm)
 Loading...
Loading...
