Chapter 3 Characteristics
3–5
3-2 Dynamic brake characteristics
When an emergency stop occurs such as that due to a servo alarm detection, the motor will stop with
the deceleration control at the standard setting. However, by setting the servo parameter (SV017:
SPEC), the dynamic brake stop can be selected. If a servo alarm that cannot control the motor occurs,
the dynamic brakes stop the servomotor regardless of the parameter setting.
3-3-1 Deceleration torque
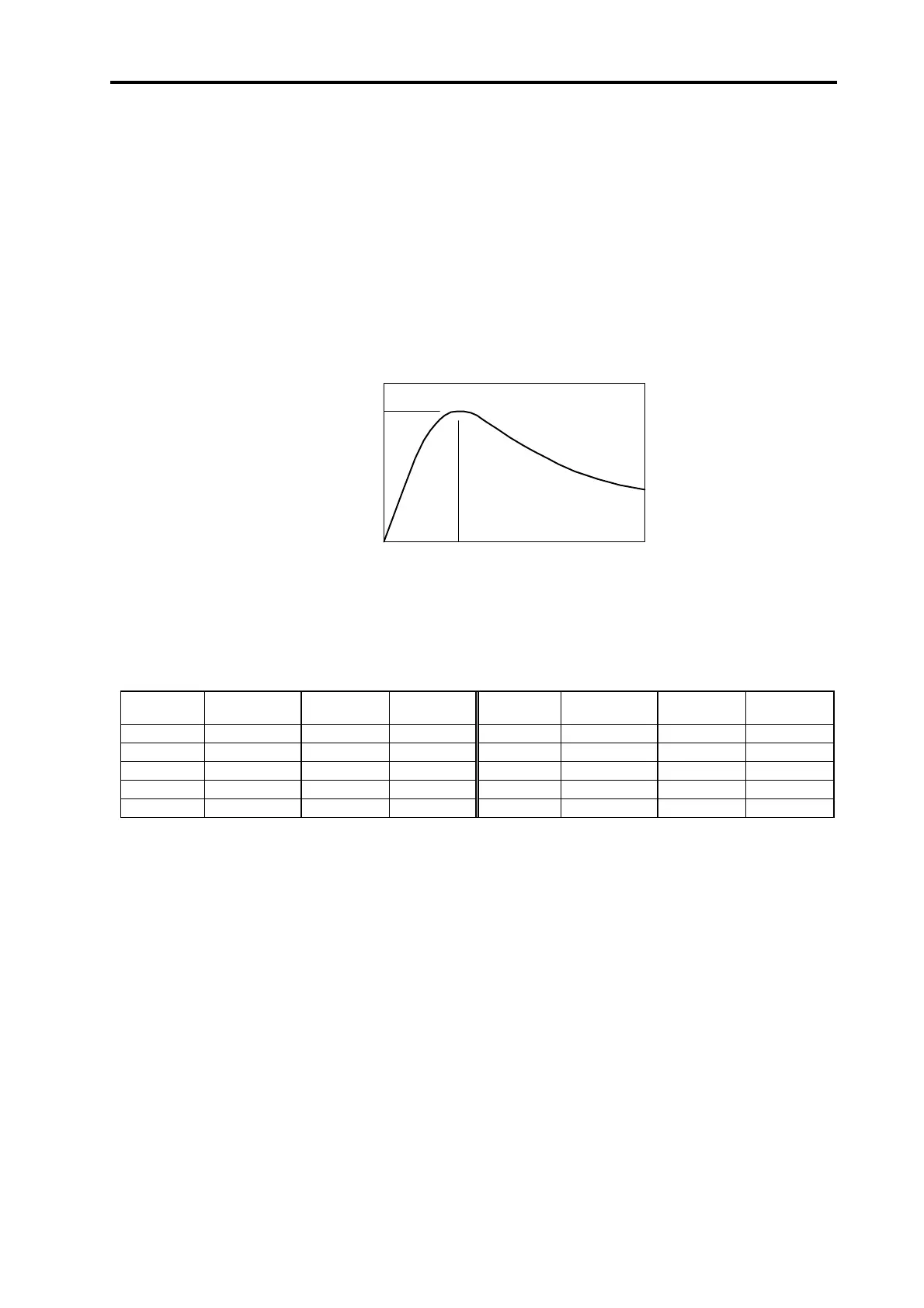
The dynamic brakes use the motor as a generator, and obtains the deceleration torque by consuming
that energy with the dynamic brake resistance. The characteristics of this deceleration torque have a
maximum deceleration torque (Tdp) regarding the motor speed as shown in the following drawing.
The torque for each motor is shown in the following table.
T
dp
N
dp
Deceleration
torque
Motor speed
0
Fig. 3-2 Deceleration torque characteristics of a dynamic brake stop
Table 3-1 Max. deceleration torque of a dynamic brake stop
Motor type
Rated torque
(N·m)
Tdp (N•m) Ndp (r/min) Motor type
Rated torque
(N·m)
Tdp (N•m) Ndp (r/min)
HS-MF23 0.64 0.40 465 HS-SF52 2.39 2.40 496
HS-RF43 HS-SF53 1.59 2.54 472
HS-RF73 3.18 3.67 582 HS-SF102 4.78 11.19 884
HS-SF103 3.18 10.72 1045
HS-SF202 9.55 10.56 457
 Loading...
Loading...
