Chapter 8 Adjustment
8–27
8-5 Collision detection
The purpose of the collision detection function is to quickly detect a collision and decelerate to a stop.
This suppresses the excessive torque generated to the machine tool, and suppresses the occurrence
of an abnormality. Impact during a collision cannot be prevented even when the collision detection
function is used, so this function does not guarantee that the machine will not break and does not
guarantee the machine accuracy after a collision. Thus, the conventional caution is required to
prevent machine collisions from occurring.
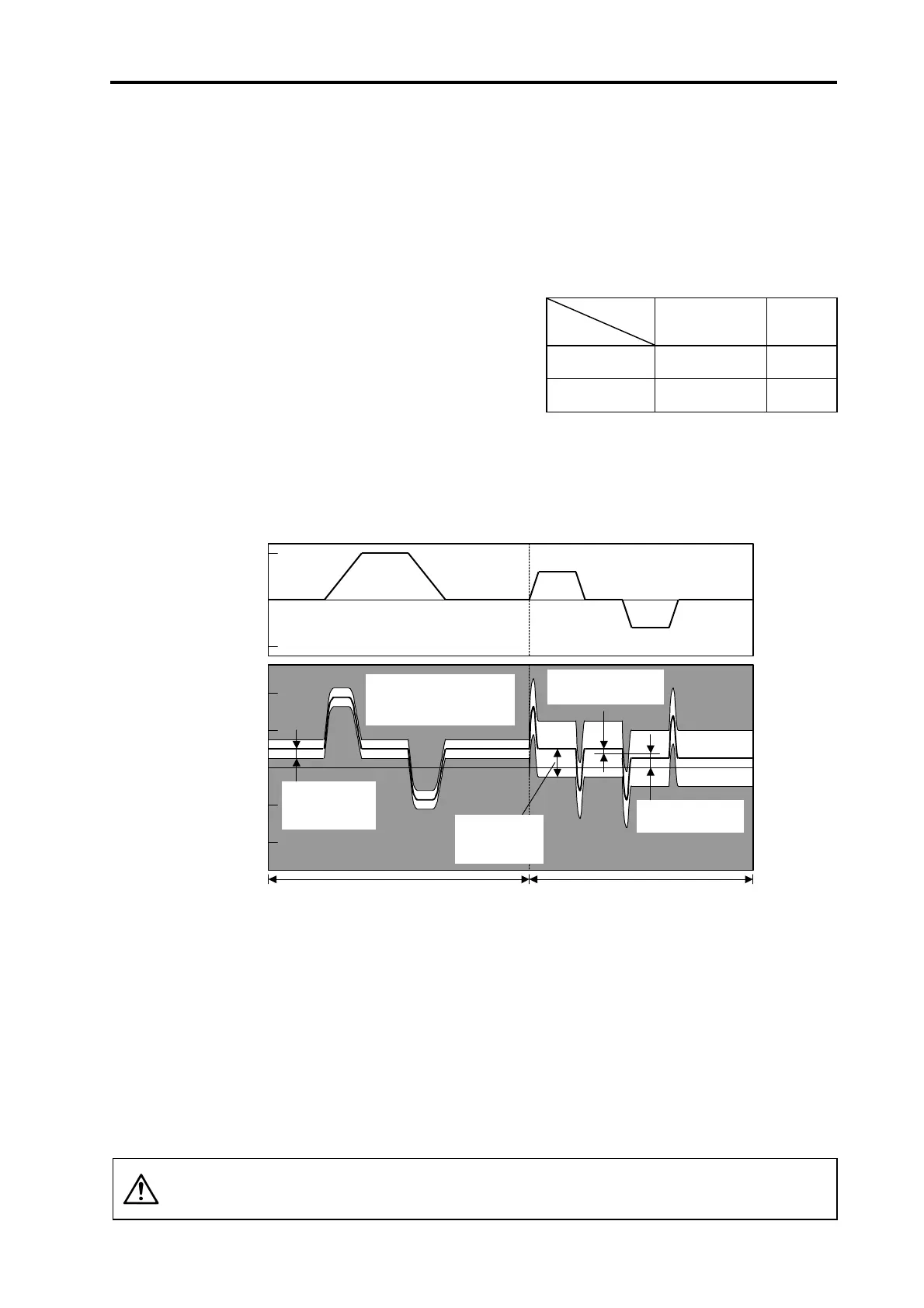
(1) Collision detection method 1
The required torque is calculated from the position
command issued from the NC. The disturbance
torque is calculated from the difference with the
actual torque. When this disturbance torque exceeds
the collision detection level set with the parameters,
the axis will decelerate to a stop with at 80% of the
motor's maximum torque. After decelerating to a
stop, the alarm 58 or 59 will occur, and the system
will stop.
The collision detection level for rapid traverse (G0) is set with TLMT: SVC060. The collision
detection level for cutting feed (G1) is set to 0 to 7-fold (SV053.clG1) based on the collision
detection level for rapid traverse. If 0 is set for clG1, the collision detection method 1 will not
function during cutting feed. If 0 is set for TLMT: SV060, all collision detections (method 1 and
method 2) will not function.
Alarm detection range for collision detection method 1
(2) Collision detection method 2
When the current command reaches the motor's maximum current, the axis will decelerate to a
stop with at 80% of the motor's maximum torque. After decelerating to a stop, the alarm 5A will
occur, and the system will stop. If the acceleration/deceleration time constant is short and
incorrect detections are made easily during normal operation, increase the
acceleration/deceleration time constant and adjust so that the current during acceleration is not
saturated (so that the maximum current is not reached).
If the acceleration/deceleration time constant cannot be increased, set parameter SV035.bit11:
SSF4.cl2n to 1 to ignore the collision detection method 2.
CAUTION
The collision detection function does not guarantee safety or machine
accuracy during a collision. Thus, the conventional caution is required to
prevent machine collisions from occurring.
Collision
detec-tion level
setting parameter
Detection
alarm
For rapid traverse
(for G0 feed)
SV060 Alarm 58
For cutting feed
(for G1 feed)
SV060×clG1
(SV035)
Alarm 59
Speed
command
(r/min)
Estimated torque
(stall %)
0
3000
200
100
-200
-100
-3000
Unbalance torque
(
)
G0 collision
detection level
(
)
Collision detection method
1 detection range
(Alarm 58/59)
Frictional torque
(SV045)
G0 collision
detection level
 Loading...
Loading...
