Chapter 8 Adjustment
8–12
INP : In-position width (SV024) (µm)
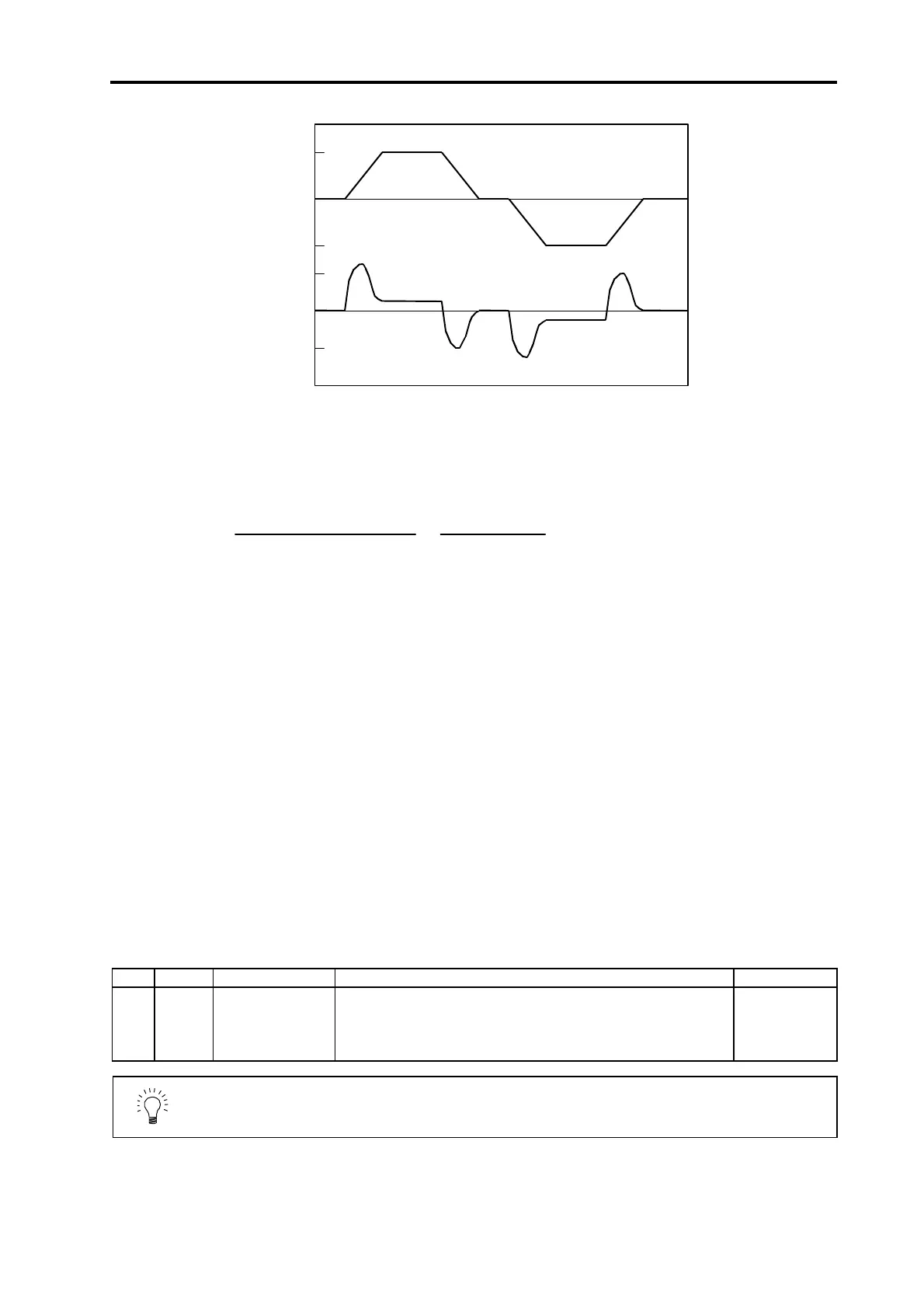
Example of speed/current command waveform during acceleration/deceleration
(Reference) The rapid traverse acceleration/deceleration time setting value G0tL for when linear
acceleration/deceleration is set is calculated with the following expression.
G0tL =
(J
L
+ J
M
)
×
No
95.5
×
(0.8
×
T
MAX
– T
L
)
6000
( PGN1
×
K)
2
(msec) –
N
O
: Motor reach speed (r/min)
J
L
: Motor shaft conversion load inertia (kg·cm
2
)
J
M
: Motor inertia (kg·cm
2
)
T
MAX
: Motor max. torque (N·m)
T
L
: Motor shaft conversion load (friction, unbalance) torque (N·m)
PGN1 : Position loop gain 1 (rad/sec)
K : "1" during normal control, "2" during SHG control
8-3-2 Vibration suppression measures
If vibration (machine resonance) occurs, it can be suppressed by lowering the speed loop gain
(VGN1). However, cutting precision and cycle time will be sacrificed. (Refer to "8-2-2 Speed loop
gain".) Thus, try to maintain the VGN1 as high as possible, and suppress the vibration using the
vibration suppression functions.
If the VGN1 is lowered and adjusted because vibration cannot be sufficiently suppressed with the
vibration suppression functions, adjust the entire gain (including the position loop gain) again.
<Examples of vibration occurrence>
• A fine vibration is felt when the machine is touched, or a groaning sound is heard.
• Vibration or noise occurs during rapid traverse.
No. Abbrev. Parameter name Explanation Setting range
SV005
VGN1 Speed loop gain
Set according to the load inertia size.
If machine resonance occurs, adjust by lowering in increments of 20 to
30%.
The setting value is 70 to 80% of the value where resonance does not
occur.
1 to 999
POINT
Suppress the vibration using the vibration suppression functions, and maintain
the speed loop gain (SV005: VGN1) as high as possible. (The standard value
is the upper limit.)
0
0
3000
200
-200
-3000
Time
Time
Speed command
(r/min)
Current command
(Stall %)
 Loading...
Loading...
