1.5.2
Putting
theory aside
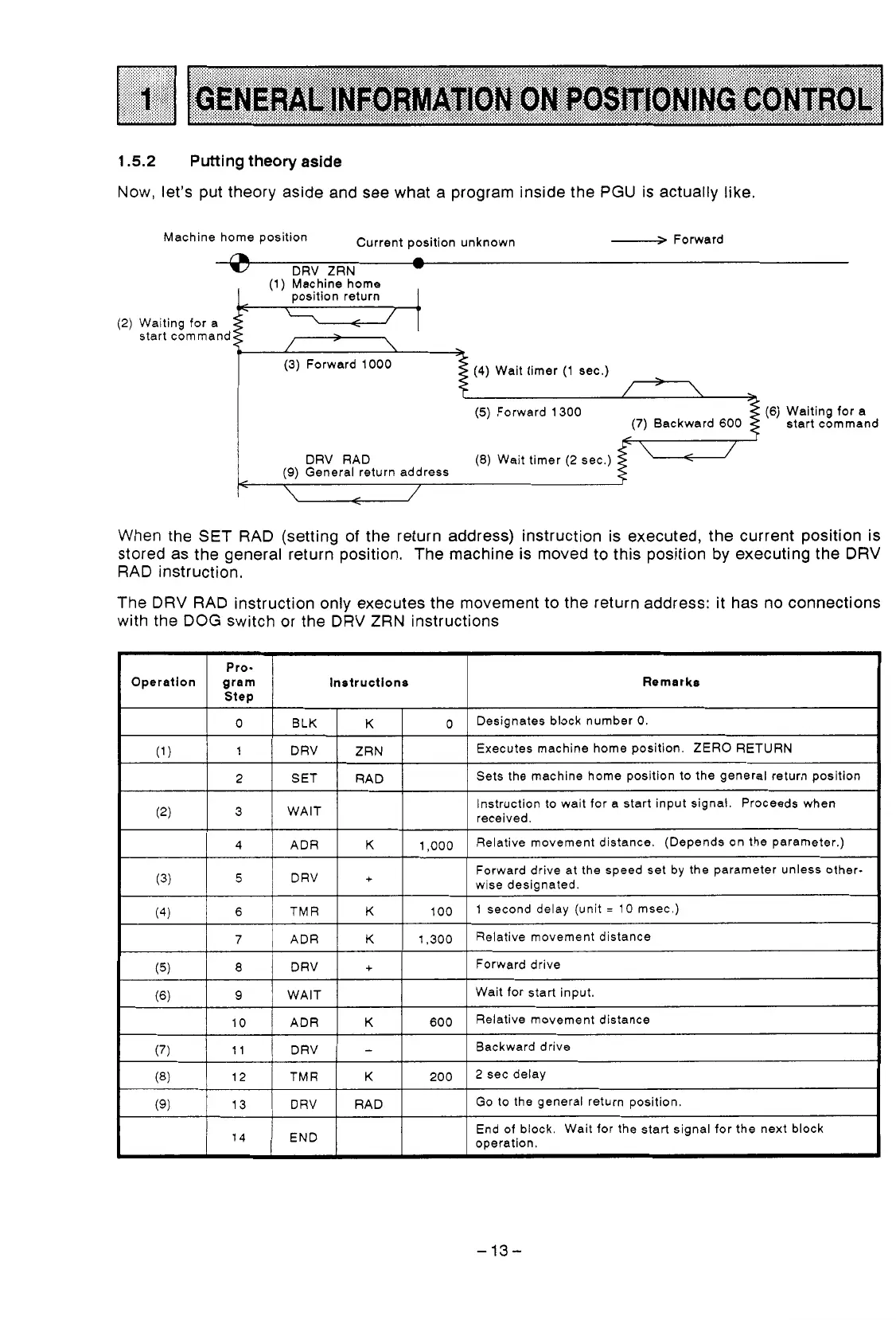
Now, let’s put theory aside and see what a program inside the PGU is actually like.
-
Machine home position Current position unknown Forward
I
position return
I
(1)
Machine home
(2)
Waiting for a
start command
r
>
I
(3)
Forward
1000
(4)
Wait timer (1 sec.)
-
(5)
Forward 1300
(7)
Backward
600
start command
(6)
Waiting for
a
DRV
RAD
(8)
Wait timer (2 sec.)
(9)
General return address
\
/
<
When the SET RAD (setting
of
the return address) instruction is executed, the current position is
stored as the general return position. The machine is moved
to
this position by executing the DRV
RAD instruction.
The DRV RAD instruction only executes the movement to the return address: it has no connections
with the DOG switch or the DRV
ZRN
instructions
Pro-
Step
Operation gram Instructions
Remarks
0
BLK
K
0
Designates block number
0.
(1)
1
DRV
ZRN
Executes machine home position.
ZERO
RETURN
2
SET RAD Sets the machine home position
to
the general return position
Instruction
to
wait
for
a start input signal. Proceeds when
received.
4
ADR
K
1,000 Relative movement distance. (Depends on the parameter.)
(3)
5
DRV
Forward drive at the speed set by the parameter unless other-
wise designated.
+
I
(9)
RAD
DRV 13
Go
to
the general return position.
I
I
1
14
END
I I
oDeration.
I
End
of
block. Wait for the start signal for the next block
L
-
13-
 Loading...
Loading...







