3.2.2
Drive interrupt
INTERRUPT
Relevant elements:
Drive interrupt by inputs
General-purpose inputs
1)
X0
to
X6
2)
KO
to K6
BFM#2
3)
Y440
to
Y444
4)
K440
to
K444
Execution time:
Instantaneous progressing
type
(1
msec)or
less.
Response times:
l),
2)
Approx.
4
msec
3),
4)
Approx.
10
msec
+
operation cycle
of
programmable controller
(Relevant elements
X
and
Y)
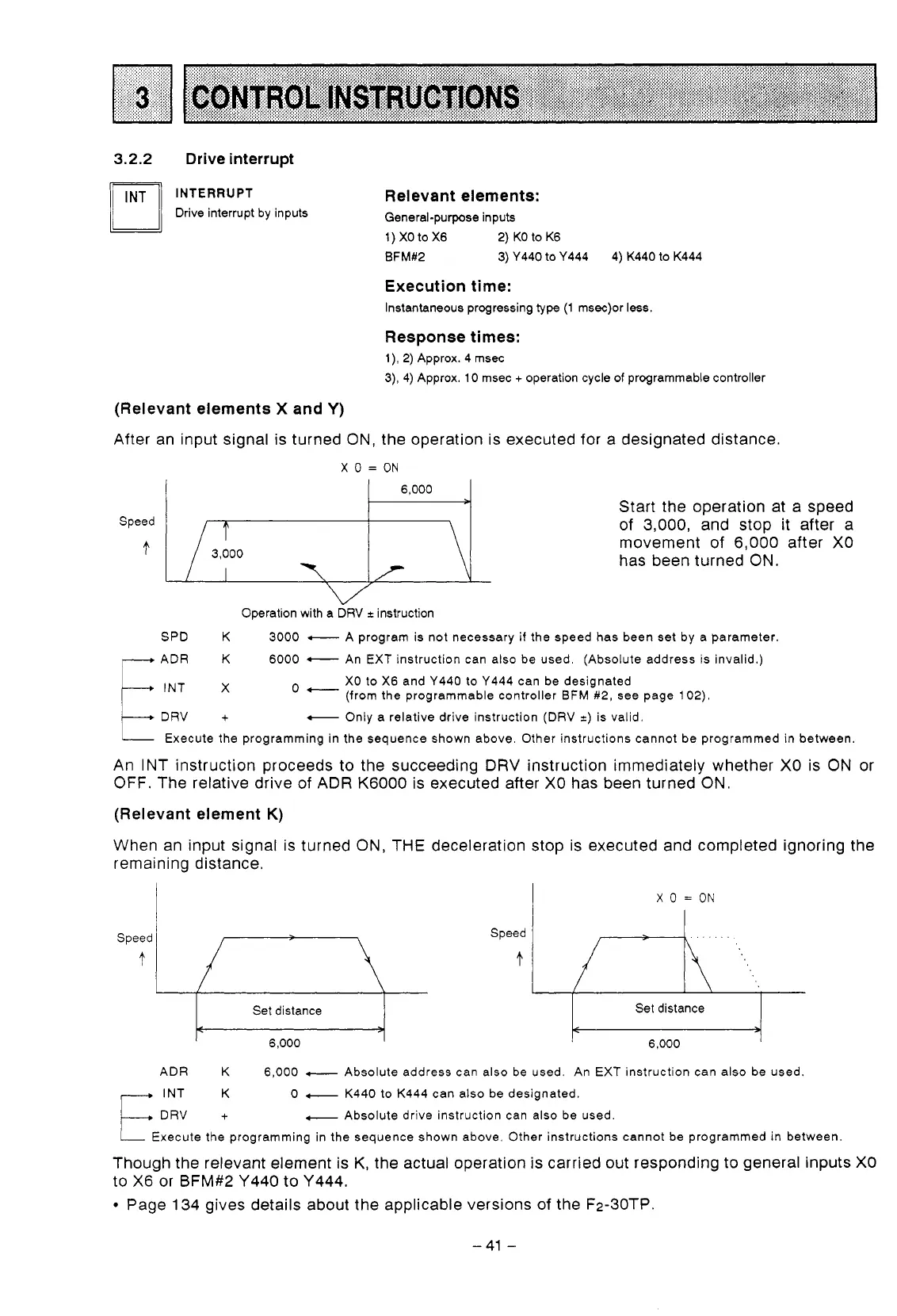
After an input signal is turned ON, the operation is executed for a designated distance.
XO=ON
I
6,000
4
Start the operation at a speed
of 3,000, and stop it after a
movement of
6,000
after
X0
has been turned ON.
Operation with a DRV
2
instruction
SPD K
3000
-
A program is not necessary
if
the speed has been set by a parameter.
g::
+
K
6000
-
An
EXT
instruction can also be used. (Absolute address is invalid.)
INT
X
0-
X0
to
X6
and
Y440
to
Y444
can be designated
(from the programmable controller BFM #2, see page
102).
-
Only a relative drive instruction (DRV
*)
is valid.
Execute the programming in the sequence shown above. Other instructions cannot be programmed in between.
An INT instruction proceeds to the succeeding
DRV
instruction immediately whether
X0
is ON or
OFF. The relative drive of ADR
K6000
is executed after
X0
has been turned ON.
(Relevant element
K)
When an input signal is turned ON, THE deceleration stop is executed and completed ignoring the
remaining distance.
XO=ON
Speed
.
Speed
.
~
?
?
Set distance
Set distance
<
>
<
5
6,000 6,000
ADR
K
6,000
c-
Absolute address can also be used. An
EXT
instruction can also be used.
,"
0
-
K440
to
K444 can
also
be designated.
-
Absolute drive instruction can also be used.
Execute the programming in the sequence shown above, Other instructions cannot be programmed in between.
Though the relevant element is
K,
the actual operation is carried out responding to general inputs
X0
to
X6
or
BFM#2
Y440 to Y444.
Page 134 gives details about the applicable versions of the F2-30TP.
-
41
-
 Loading...
Loading...







