5 - 48
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
5.2.5 OPR basic parameters
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
0 : Near-point dog method 0
4 : Count method 1) 4
5 : Count method 2) 5
Pr.43
OPR method
6 : Data set method 6
0 70 220 370 520
Pr.43
OPR method
Set the "OPR method" for carrying out machine OPR.
0 : Near-point dog method........ After decelerating at the near-point dog ON, stop
at the zero signal and complete the OPR.
4 : Count method 1) .................. After decelerating at the near-point dog ON, move
the designated distance, and complete the OPR
with the zero signal.
5 : Count method 2) .................. After decelerating at the near-point dog ON, move
the designated distance, and complete the OPR.
6 : Data set method................... The position where the OPR has been made will
be the OP.
Note) Refer to "8.2.2 Machine OPR method" for details on the OPR methods.
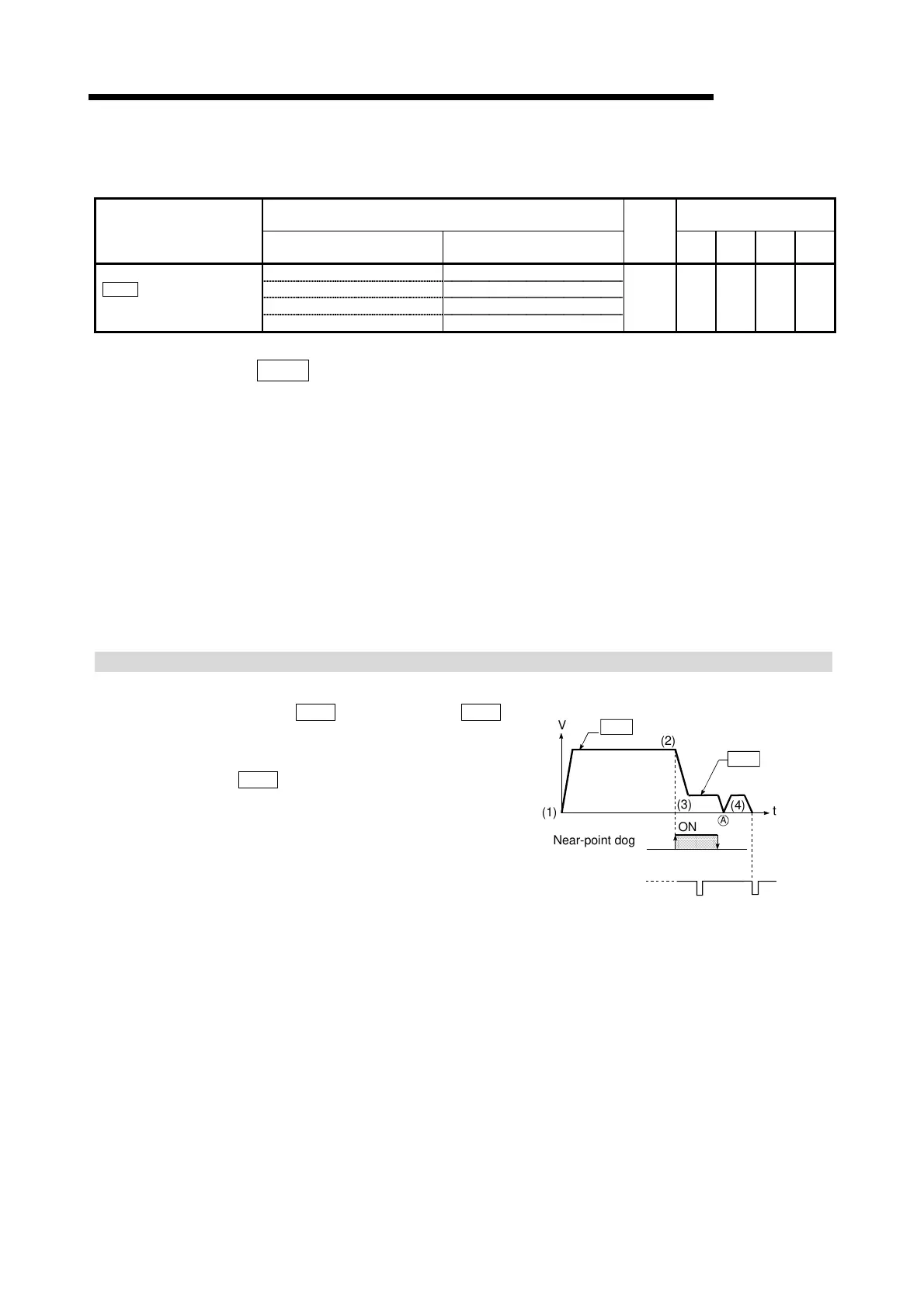
OPR method
0 : Near-point dog method
(1) Start OPR.
(Start movement at the
Pr.46
OPR speed in the
Pr.44
OPR direction.)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to
Pr.47
Creep speed, and move with the
creep speed.
(At this time, the near-point dog must be ON. If the near-
point dog is OFF, the axis will decelerate to a stop.)
(4) At the first zero signal after the near-point dog turned OFF,
OPR is completed.
Note) After the servo amplifier has been turned on, the zero
point of the encoder must be passed at least once
before point A is reached.
A
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Zero signal
Pr.47
Creep speed
OPR speed
Pr.46

 Loading...
Loading...