5 - 54
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
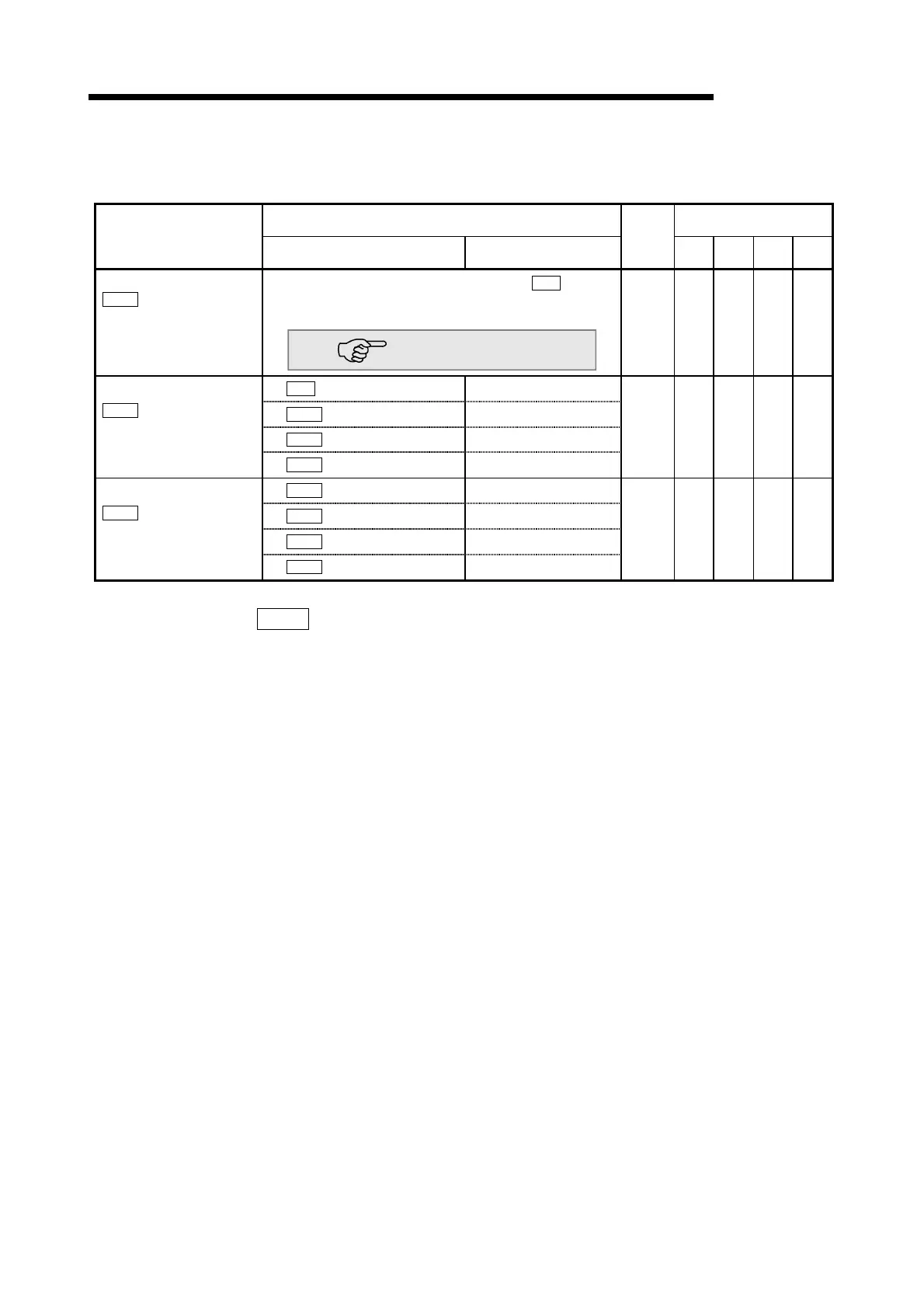
5.2.6 OPR detailed parameters
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.50
Setting for the movement
amount after near-point dog
ON
The setting value range differs depending on the
Pr.1
Unit
setting.
Here, the value within the [Table 1] range is set.
[Table 1] on right page
0
80
81
230
231
380
381
530
531
0 :
Pr.9
Acceleration time 0
0
1 :
Pr.25
Acceleration time 1
1
2 :
Pr.26
Acceleration time 2
2
Pr.51
OPR acceleration time
selection
3 :
Pr.27
Acceleration time 3
3
0 82 232 382 532
0 :
Pr.10
Deceleration time 0
0
1 :
Pr.28
Deceleration time 1
1
2 :
Pr.29
Deceleration time 2
2
Pr.52
OPR deceleration time
selection
3 :
Pr.30
Deceleration time 3
3
0 83 233 383 533
Pr.50
Setting for the movement amount after near-point dog ON
When using the count method 1) or 2), set the movement amount to the OP after
the near-point dog signal turns ON.
(The movement amount after near-point dog ON should be equal to or greater
than the sum of the "distance covered by the deceleration from the OPR speed to
the creep speed" and "distance of movement in 10 ms at the OPR speed".)

 Loading...
Loading...