5 - 7
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
5.1.4 Setting items for servo parameters
The servo parameters are used to control the servomotor and the data that is
determined by the specification of the servo being used.
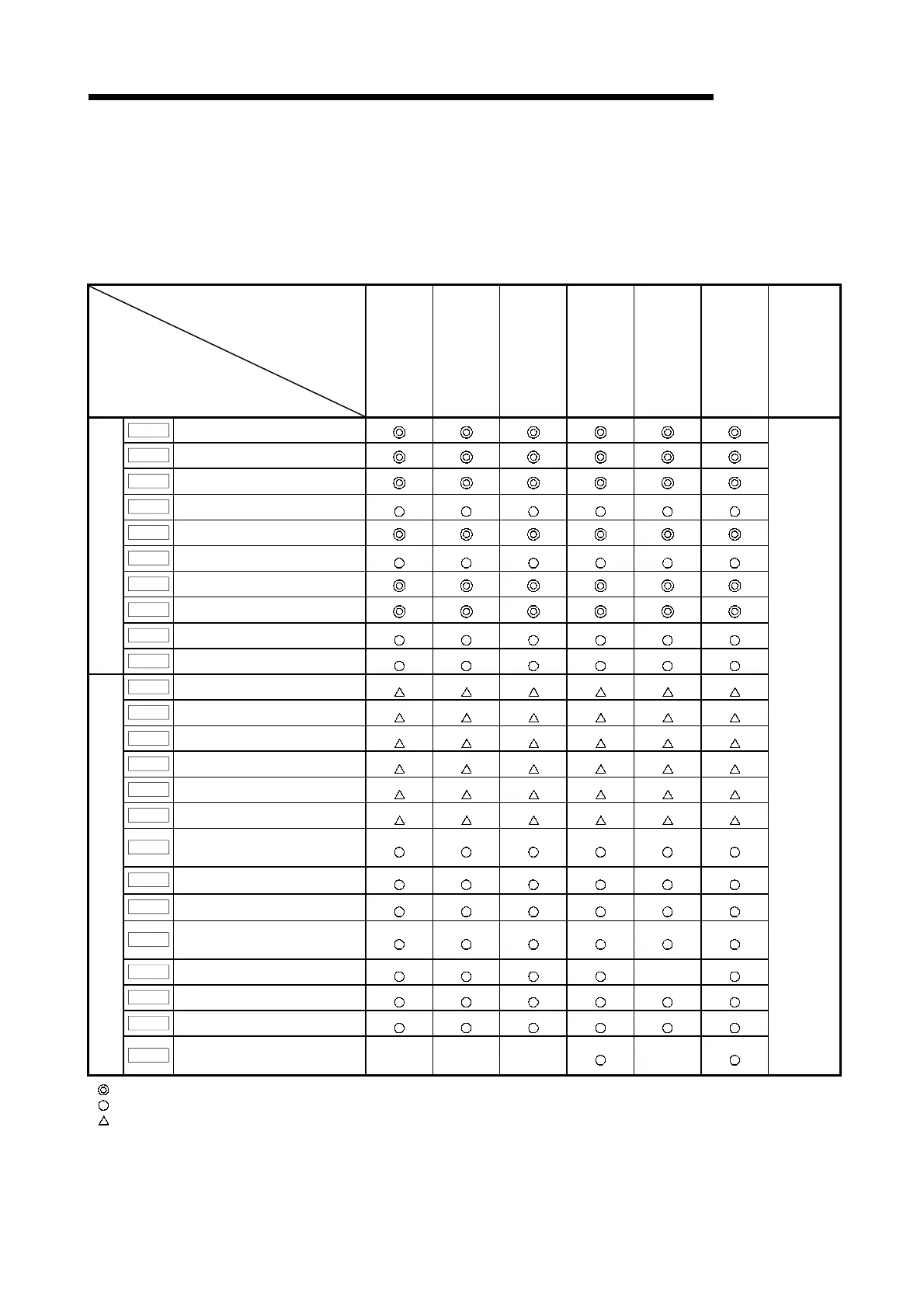
The table below lists items set to the servo parameters.
Servo amplifier
Servo parameters
MR-H-BN MR-H-BN4 MR-J2-B MR-J2S-B MR-J2-Jr MR-J2M-B Remark
Pr.100
Servo series
Pr.101
Amplifier setting
Pr.102
Regenerative brake resistor
Pr.103
Motor type
Pr.104
Motor capacity
Pr.105
Servo motor speed
Pr.106
Feed back pulse
Pr.107
Rotation direction selection
Pr.108
Auto tuning
Servo basic parameters
Pr.109
Servo response
Pr.112
Load inertia ratio
Pr.113
Position loop gain 1
Pr.114
Speed loop gain 1
Pr.115
Position loop gain 2
Pr.116
Speed loop gain 2
Pr.117
Speed integral compensation
Pr.118
Machine resonance suppression
filter
Pr.119
Feed forward gain
Pr.120
In-position range
Pr.121
Electromagnetic brake sequence
output
Pr.122
Analog monitor output
–
Pr.123
Optional function 1
Pr.124
Optional function 2
Servo adjustment parameters
Pr.125
Adaptive vibration suppression
control/ low pass filter
– – –
–
Refer to the
section
5.2.7
: Always set
: Set as required ("–" when not set)
: Setting restricted
– : Setting not required (This is an irrelevant item, so the setting value will be ignored. If the value is the default value or within the setting range, there is no
problem.)

 Loading...
Loading...