12 - 14
MELSEC-Q
12 CONTROL SUB FUNCTIONS
12.3.2 Electronic gear function
The "electronic gear function" adjusts the pulses calculated and output according to the
parameters set in the QD75 with the actual machine movement amount.
The "electronic gear function" has the following four functions.
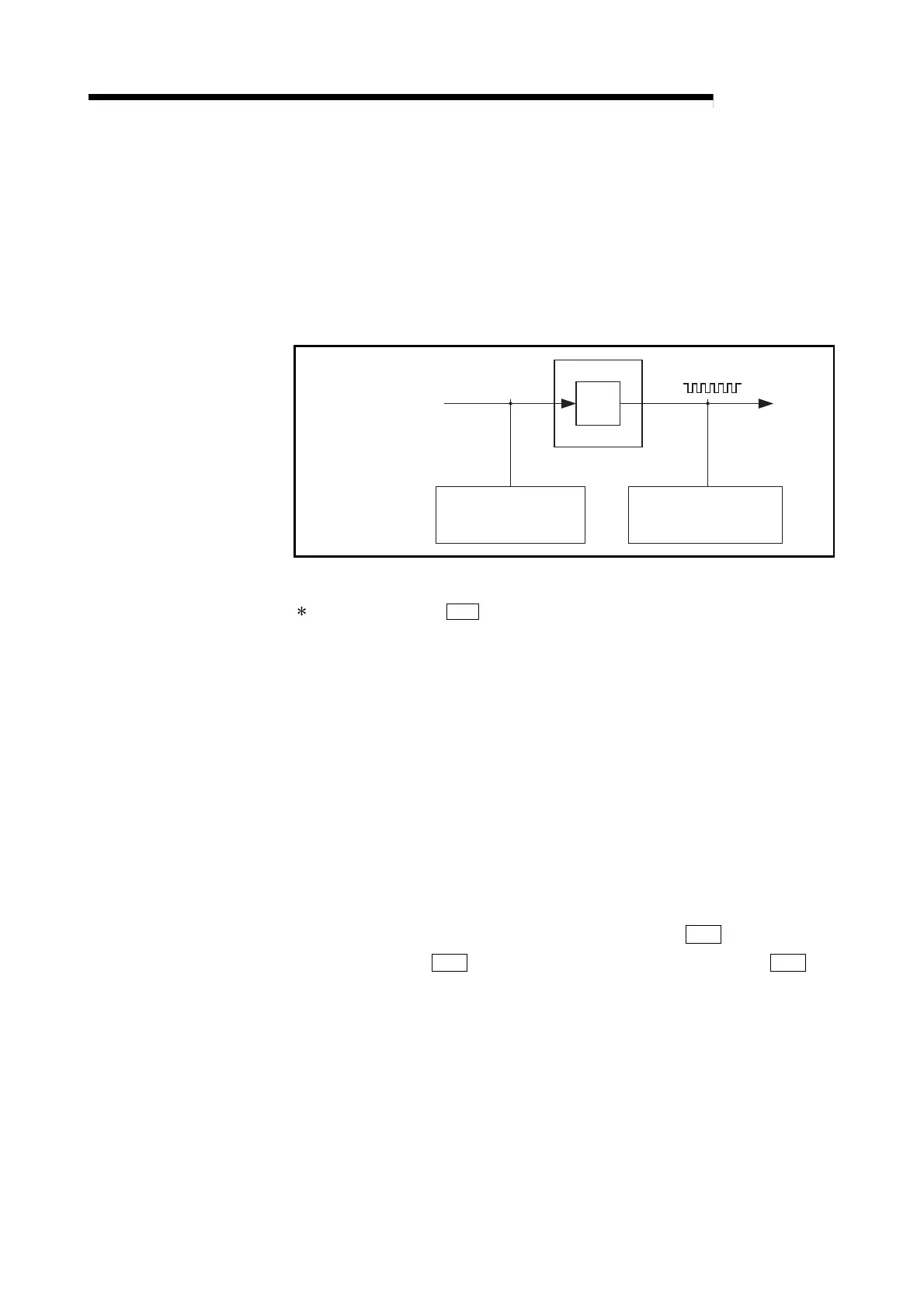
[A] The function converts the command value (speed, movement amount), which
is set in mm units, to pulse units, and determines the pulse frequency and
pulse number of the command pulse.
QD75
Command output pulses
Set value in each unit *1.
Speed: V
Movement amount: L
Speed: Frequency
Movement amount: Number
of pulses
Command value
CPU module,
GX Configurator-QP
Electronic
gear
Fig. 12.9 Conversion to pulse units
1: Unit specified with "
Pr.1
Unit setting" (mm, inch, degree, pulse)
[B] During machine movement, the function increments in the QD75 values less
than one pulse that could not be pulse output, and outputs the incremented
amount of pulses when the total incremented value reached one pulse or
more.
[C] When machine OPR is completed, current value changing is completed,
speed control is started (except when current feed value change is present), or
fixed-feed control is started, the function clears to "0" the cumulative values of
less than one pulse which could not be output. (If the cumulative value is
cleared, an error will occur by a cleared amount in the feed machine value.
Control can be constantly carried out at the same machine movement amount,
even when the fixed-feed control is continued.)
[D] The function compensates the mechanical system error of the command
movement amount and actual movement amount by adjusting the "movement
amount per pulse".
(The "movement amount per pulse" value is defined by "
Pr.2
No. of pulses
per rotation (Ap)", "
Pr.3
Movement amount per rotation (Al)", and "
Pr.4
Unit magnification (Am)".)
The QD75 automatically carries out the processing for [A] and [C].
The details shown below explain about the "electronic gear function", including the
method for compensating the error in [D] above, etc.
[1] Movement amount per pulse
[2] Error compensation method
[3] Control Precautions
 Loading...
Loading...
