Getting Started
22 A5E36037886-003, 04/2017
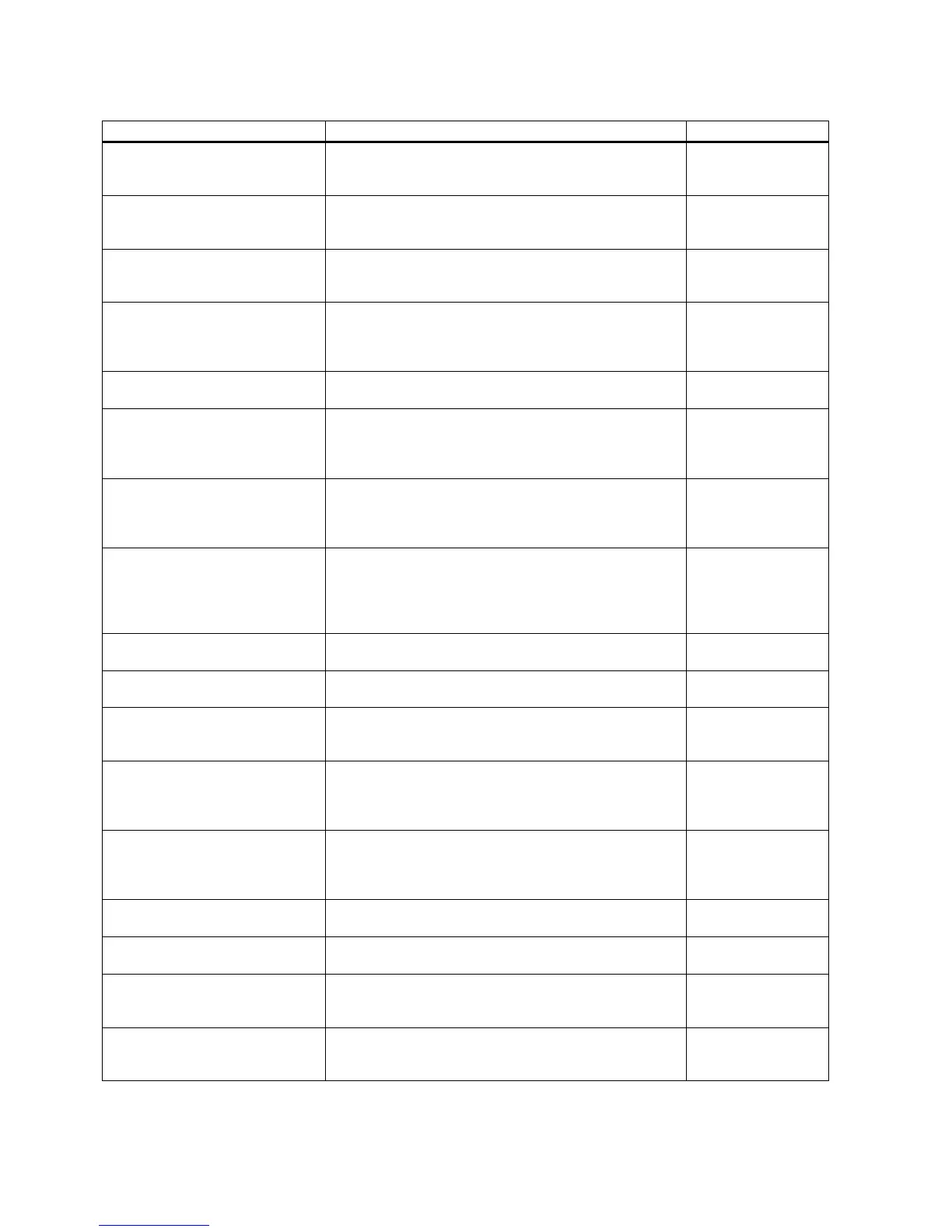
Pulse train input position control
(PTI)
Implements accurate positioning through two pulse train
input channels: 5 V differential or 24 V single end signal. In
addition, it supports S-curve position smoothing function
PTI
Internal position control (IPos) Implements accurate positioning through internal position
commands (up to eight groups) and allows to specify the
acceleration/speed for positioning
IPos
Speed control (S)
Flexibly controls motor speed and direction through external
analog speed commands (0 - ±10 VDC) or internal speed
commands (up to seven groups)
S
Torque control (T) Flexibly controls motor output torque through external ana-
log torque commands (0 - ±10 VDC) or internal torque
commands. In addition, it supports speed limit function to
prevent overspeed when a motor has no loads
T
Compound controls Supports flexible switches among position control mode,
speed control mode, and torque control mode
Absolute position system Allows to implement motion control tasks immediately after
the servo system with an absolute encoder is powered on,
needless of carrying out referencing or zero position opera-
PTI
Gain switching Switches between gains during motor rotation or stop with
an external signal or internal parameters to reduce noise
and positioning time, or improve the operation stability of a
PTI, IPos, S
PI/P switching Switches from PI control to P control with an external signal
or internal parameters to suppress overshooting during
acceleration or deceleration (for speed control mode) or to
suppress undershooting during positioning and reduce the
settling time (for position control mode)
PTI, IPos, S
SafeTorque Off (STO) Safely disconnects torque-generating motor power supply
to prevent an unintentional motor restart
PTI, IPos, S, T
Zero speed clamp Stops motor and clamps the motor shaft when motor speed
setpoint is below a parameterized threshold level
S
Modbus communication Supports the communication between the SINAMICS V90
servo drive and PLC with the standard Modbus communica-
PTI, IPos, S, T
One-button auto tuning Estimates the machine characteristic and sets the closed
loop control parameters (position loop gain, speed loop
gain, speed integral compensation, filter if necessary, etc.)
without any user intervention
PTI, IPos, S, T
Real-time auto tuning Estimates the machine characteristic and sets the closed
loop control parameters (position loop gain, speed loop
gain, speed integral compensation, filter if necessary, etc.)
continuously in real time without any user intervention
PTI, IPos, S, T
Resonance suppression Suppresses the mechanical resonance, such as workpiece
PTI, IPos, S, T
Low frequency vibration suppres-
Suppresses the low frequency vibration in the machine
IPos
Speed limit Limits motor speed through external analog speed limit
commands (0 - ±10 VDC) or internal speed limit commands
PTI, IPos, S, T
Torque limit Limits motor torque through external analog torque limit
commands (0 - ±10 VDC) or internal torque limit commands

 Loading...
Loading...









