Getting Started
A5E36037886-003, 04/2017
23
Defines a multiplier factor for input pulses
Basic operator panel (BOP)
Displays servo status on a 6-digit 7-segment LED display
External braking resistor An external braking resistor can be used when the internal
braking resistor is insufficient for regenerative energy
PTI, IPos, S, T
Digital inputs/outputs (DIs/DOs) Control signals and status signals can be assigned to eight
programmable digital inputs and six digital outputs
PTI, IPos, S, T
Smoothing function Transforms position characteristics from the pulse train
input setpoint into an S-curve profile with a parameterized
PTI
SINAMICS V-ASSISTANT You can perform parameter settings, test operation, ad-
justment and other operations with a PC
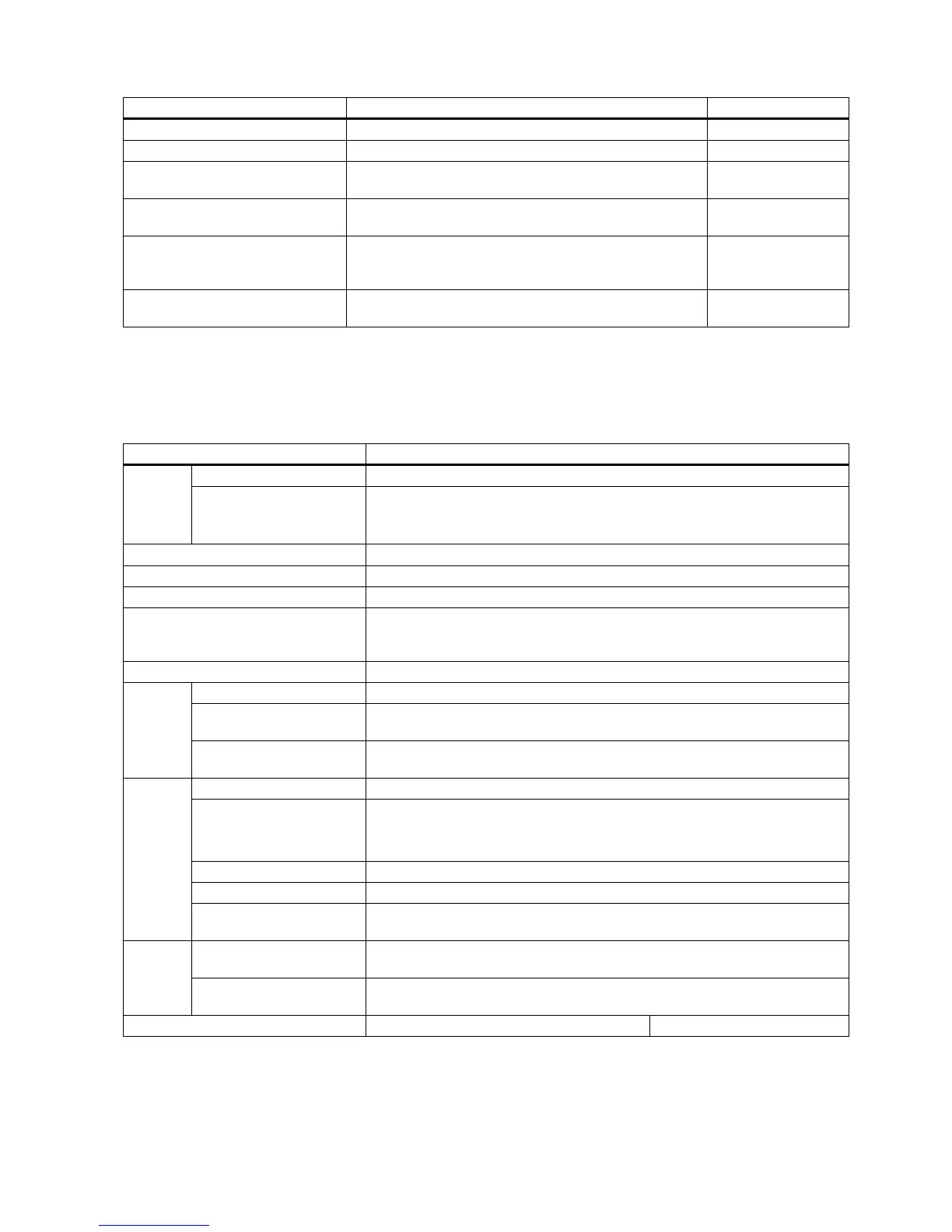
Technical data - servo drives
General technical data
Maximum current (A) When using a motor without a brake: 1.6 A
When using a motor with a brake: 1.6 A + motor holding brake rated current (See
Section "Technical data - servo motors (Page 27)".)
Protective functions Earthing fault protection, output short-circuit protection
2)
, overvolt-
age/undervoltage protection
3)
, I
2
t inverter,I
2
t motor, IGBT overtemperature pro-
Analog speed command 1:2000, internal speed command 1:5000
Analog speed command
input
-10 VDC to +10 VDC/rated speed
Torque limit Set through a parameter or the analog input command (0 VDC to +10 VDC/max.
Position
control
mode
Max. input pulse frequency 1 M (differential input), 200 kpps (open collector input)
Command pulse multiplying
factor
Electronic gear ratio (A/B)
A: 1 - 10000, B: 1 - 10000
In-position range setting
0 to ±10000 pulse (command pulse unit)
Torque limit Set through a parameter or the analog input command (0 VDC to +10 VDC/max.
Torque
control
mode
Analog torque command
-10 VDC to +10VDC/max. torque (input impedance 10 kΩ to 12 kΩ)
Speed limit Set through a parameter or the analog input command (0 VDC to +10 VDC/max.

 Loading...
Loading...









