Getting Started
A5E36037886-003, 04/2017
51
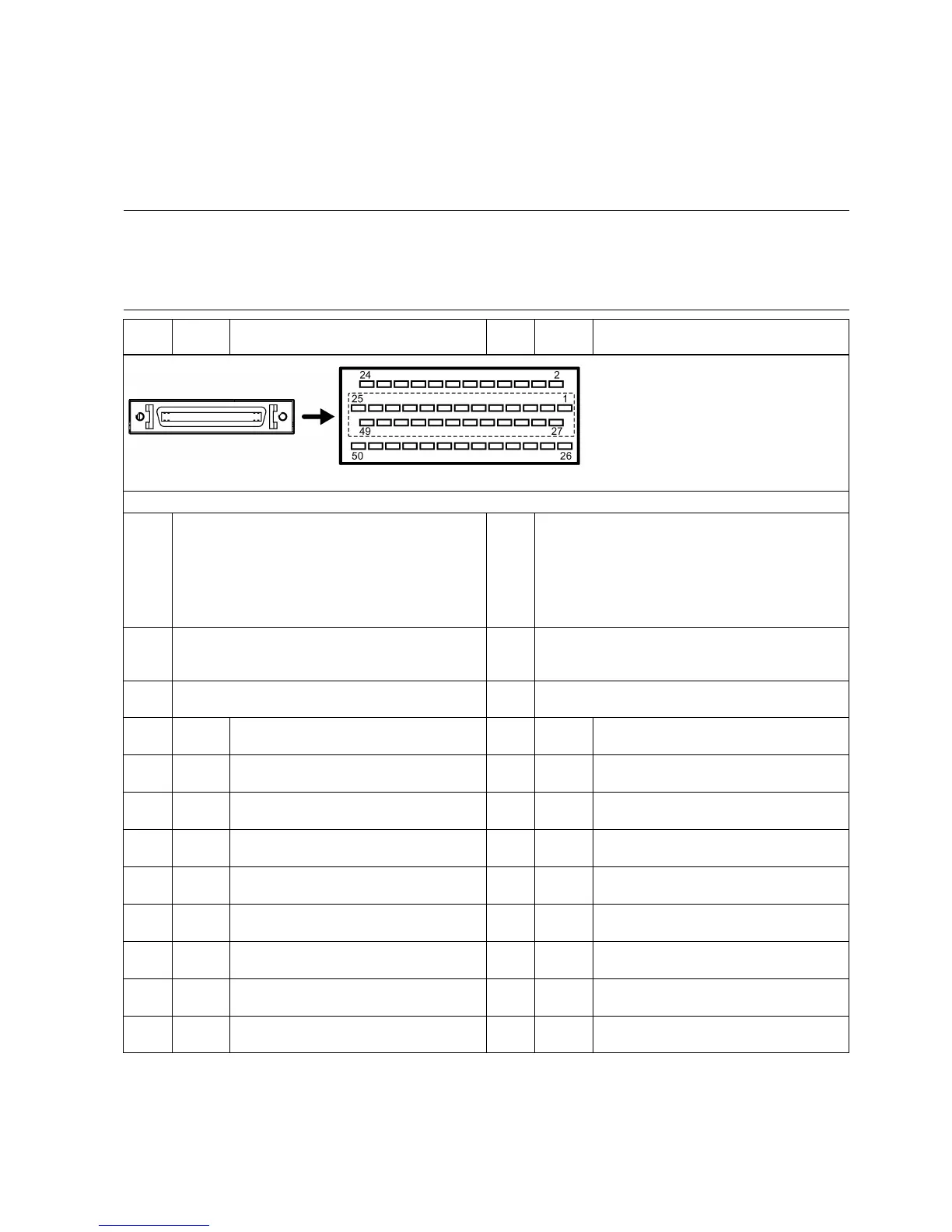
Control/Status interface - X8
4.3.1
The pins with an asterisk (*) have been redefined in the table below, wherein DO4(+/-) to DO6(+/-) are used for the servo
drive to support the wiring of
the NPN and the PNP types.
Note
The pin definition updates are applicable only when the FS (f
unction state) version is as follows:
V90 200 V: FS02 and the later
V90 400 V: FS04 and the later
Refer to the rating plate on the drive housing for the FS version of a SINAMICS V90 servo drive.
Pulse train inputs (PTI)/Pulse train encoder outputs (PTO)
1, 2,
26, 27
Position setpoint with pulse train input.
High-speed 5 V differential pulse train input
(RS485)
Maximum frequency: 1MHz
Signal transmission of this channel has better noise
36,
37,
38, 39
Position setpoint with pulse train input.
24 V single end pulse train input
Maximum frequency: 200 kHz
15,
16,
Encoder emulation pulse output with high-speed 5
V differential signals (A+/A-, B+/B-)
42, 43 Encoder Zero phase pulse output with high-speed 5
V differential signals
17 Encoder Zero phase pulse output with open collec-
High-speed 5 V differential pulse train
15 PTOA+ High-speed 5 V differential pulse train
High-speed 5 V differential pulse train
16 PTOA- High-speed 5 V differential pulse train
High-speed 5 V differential pulse train
Pulse train encoder output Z signal (open
High-speed 5 V differential pulse train
24 * M PTO and PTI_D reference ground
36 PTIA_2
24 V pulse train input A, positive 25 * PTOZ_
Pulse train output Z signal reference
ground (open collector output)
24 V pulse train input A, ground 40 PTOB+ High-speed 5 V differential pulse train
24 V pulse train input B, positive 41 PTOB- High-speed 5 V differential pulse train
24 V pulse train input B, ground 42 PTOZ+ High-speed 5 V differential pulse train
43 PTOZ- High-speed 5 V differential pulse train

 Loading...
Loading...









