190 Parameters
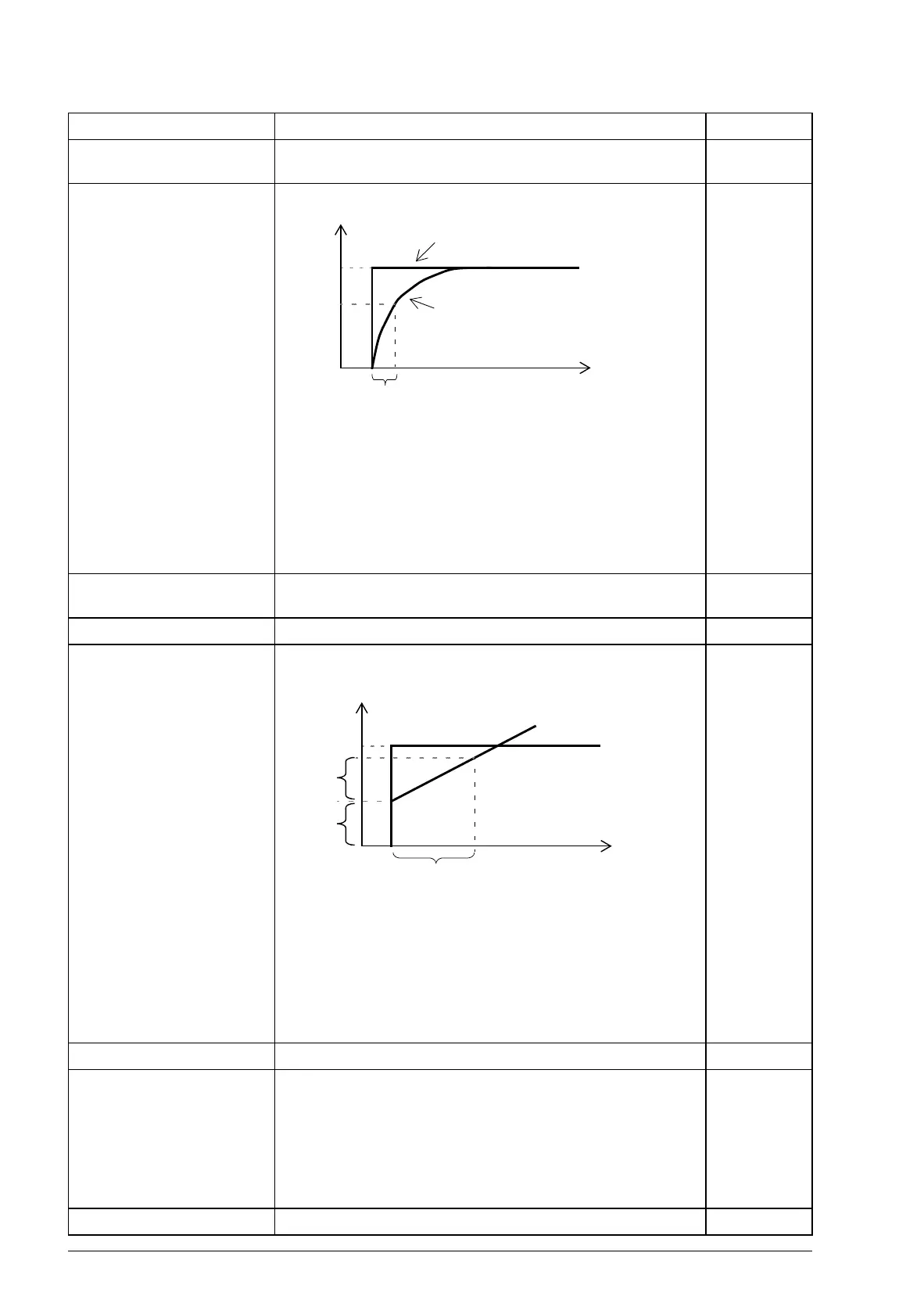
27.10 PID fbk ftime Defines the time constant for the filter through which the
process feedback is connected to the PID controller.
0.000 … 30.000 s Filter time constant. 1000 = 1 s
27.12 PID gain Defines the gain for the process PID controller. See
parameter 27.13 PID integ time.
0.00 … 100.00 Gain for PID controller. 100 = 1
27.13 PID integ time Defines the integration time for the process PID controller.
Note: Setting this value to 0 disables the “I” part, turning the
PID controller into a PD controller.
0.00 … 320.00 s Integration time. 100 = 1 s
27.14 PID deriv time Defines the derivation time of the process PID controller. The
derivative component at the controller output is calculated on
basis of two consecutive error values (E
K-1
and E
K
) according
to the following formula:
PID DERIV TIME × (E
K
- E
K-1
)/T
S
, in which
T
S
= 12 ms sample time
E = Error = Process reference - process feedback.
0.00 … 10.00 s Derivation time. 100 = 1 s
No. Name/Value Description FbEq
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = filter input (step)
O = filter output
t = time
T = filter time constant
Unfiltered signal
Filtered signal
Ti
O
I
G × I
G × I
I = controller input (error)
O = controller output
G = gain
Ti = integration time
Time
Error/Controller output

 Loading...
Loading...















