4 Repair
4.7.2. Replacement of motor, axis 2
3HAC026048-001 Revision: A160
© Copyright 2006-2008 ABB. All rights reserved.
13. Tighten the four attachment screws. 4 pcs. Tightening torque: 23 Nm.
14. Perform a leak-down test. Detailed in section Performing a
leak-down test on page 86.
15. Fill the gearbox with oil. Type and amount of oil is specified in
section Oil in gearboxes on page 80.
16. Refit the connection box and secure with the
three attachment screws and plain washers.
Make sure that the gasket is fitted properly!
Shown in the figure Location of
motor, axis 2 on page 156.
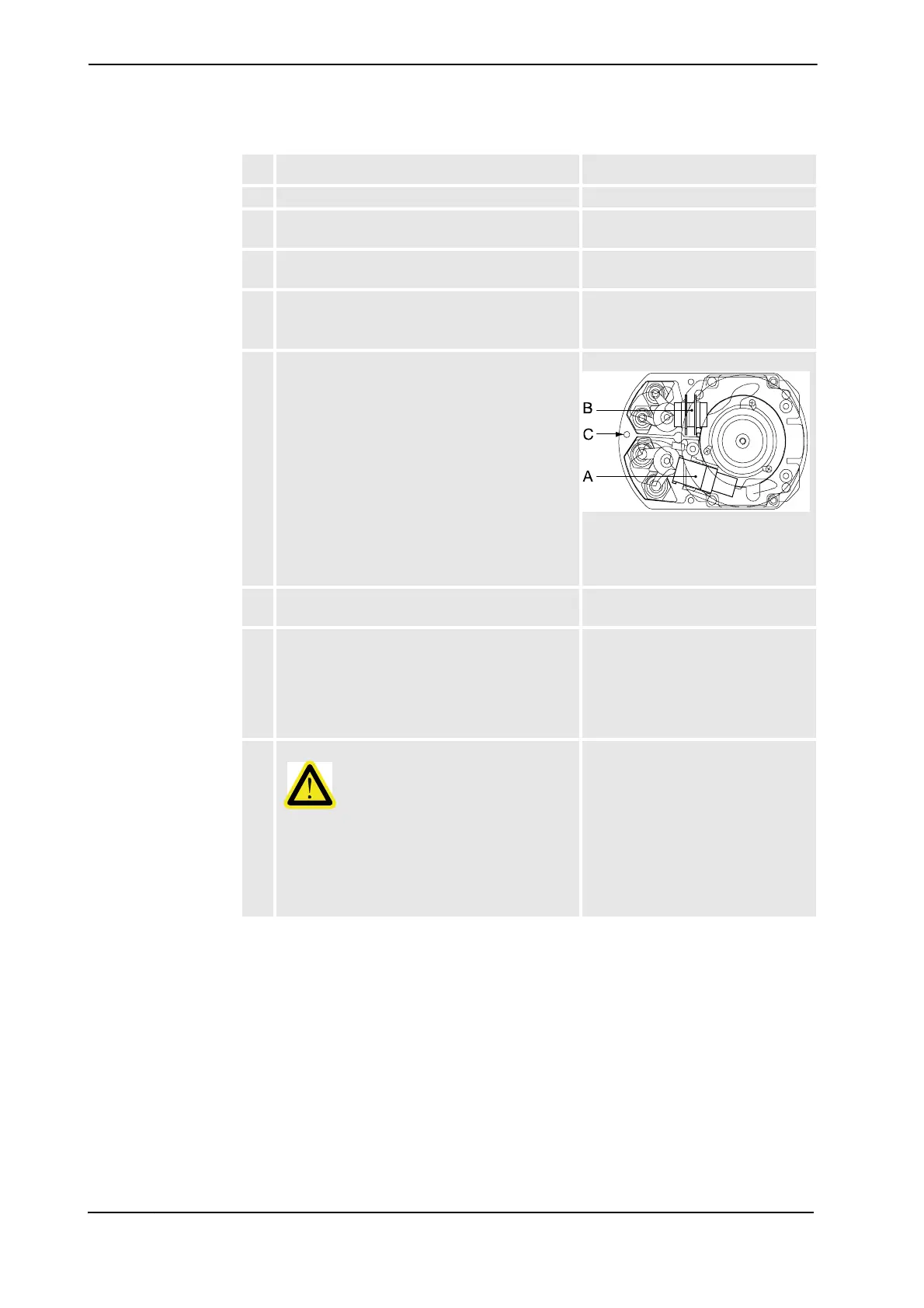
17. Reconnect connectors R3.MP2 and R3.FB2.
xx0200000401
•A: R3.MP2
•B: R3.FB2
• C: Connection box
18. Refit the cover of the connection box. Shown in the figure Location of
motor, axis 2 on page 156.
19. Recalibrate the robot. Calibration is detailed in a separate
calibration manual, enclosed with the
calibration tools.
General calibration information is
included in section Calibration
information on page 175.
20.
-
Danger!
Make sure all safety requirements are met when
performing the first test run. These are further
detailed in section DANGER - First test run may
cause injury or damage! on page 32.
Action Note/Illustration
Continued
 Loading...
Loading...





