2 Installation and commissioning
2.2.2. Working range
3HAC026048-001 Revision: A40
© Copyright 2006-2008 ABB. All rights reserved.
2.2.2. Working range
Working range
This section specifies the working areas of the robot models.
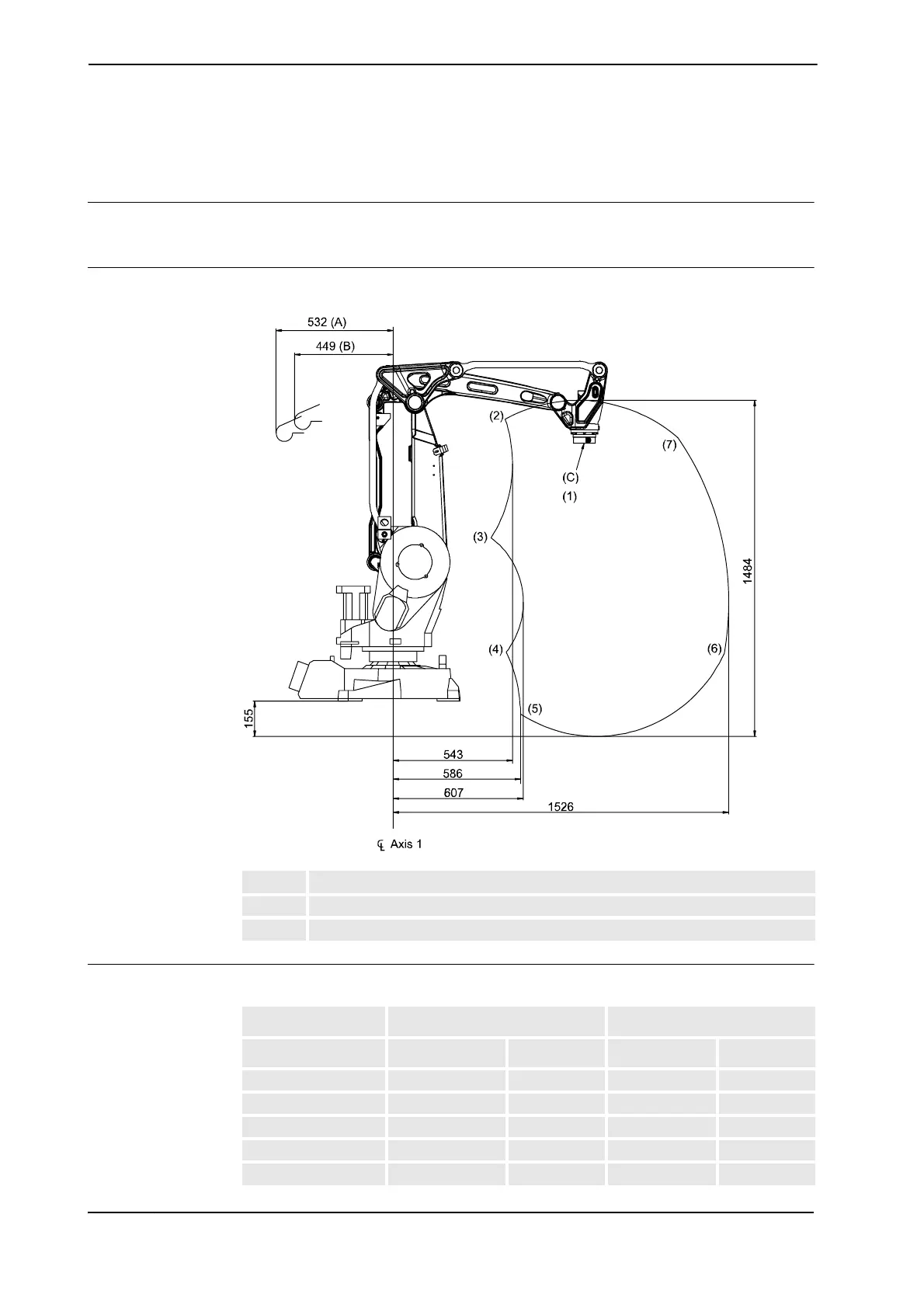
IRB 260
The extreme positions of the robot are specified at the tool flange center (dimensions in mm).
xx0500001926
Positions in the working range
The table below specifies the positions inside the working range, shown in the figure above.
A Position at mechanical stop
B Position at maximum working range, axis 2
C Tool flange center
Position in figure Position (mm) Angles (º)
X Z Axis 2 Axis 3
1 870 1139 0 0
2 510 1246 -28 -17
3 446 722 -28 31
4 515 218 60 119
5 607 -73 85 119
Continues on next page
 Loading...
Loading...





