2 Installation and commissioning
2.3.2. Manually releasing the brakes
3HAC026048-001 Revision: A46
© Copyright 2006-2008 ABB. All rights reserved.
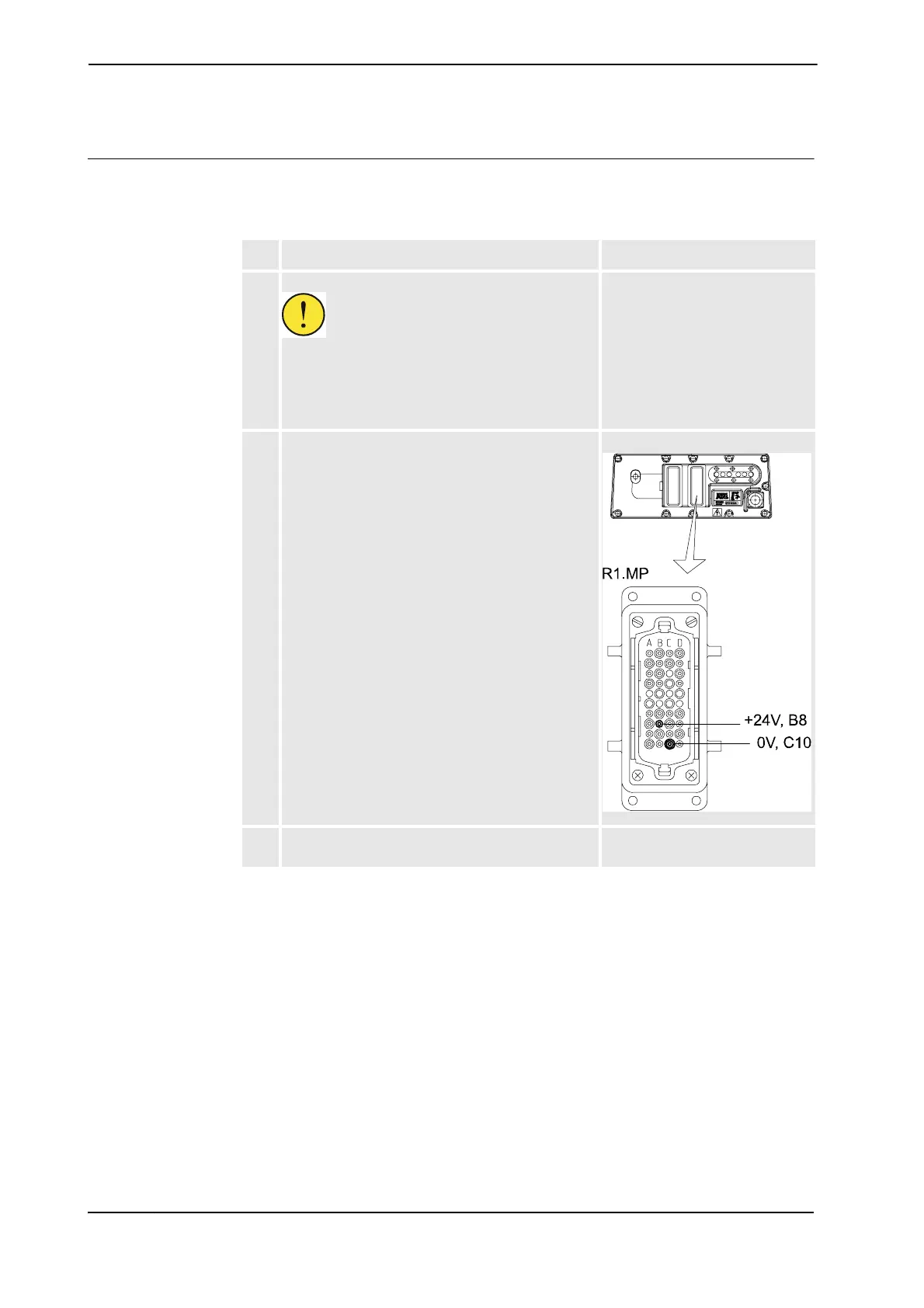
Supplying power to connector R1.MP
If the robot is not connected to the controller, power must be supplied to connector R1.MP in
the robot base in order to enable the brake release unit on the robot.
Action Note/Illustration
1.
-
Caution!
Be careful not to interchange the 24 VDC and 0V
pins! If they are mixed up, damage can be caused
to a resistor diode and to the system board.
2. Connect an external power supply to connector
R1.MP, at the robot base.
Supply:
• +24 V on pin B8
• 0 V on pin C10
xx0200000167
3. Release the brakes with the brake release unit as
detailed in the previous procedure.
Continued

 Loading...
Loading...




