4.3.5 Replacing the base, including axis 1 gearbox
Introduction
The term complete arm system used in this procedure is defined as the complete
robot excluding:
• base
• gearbox axis 1
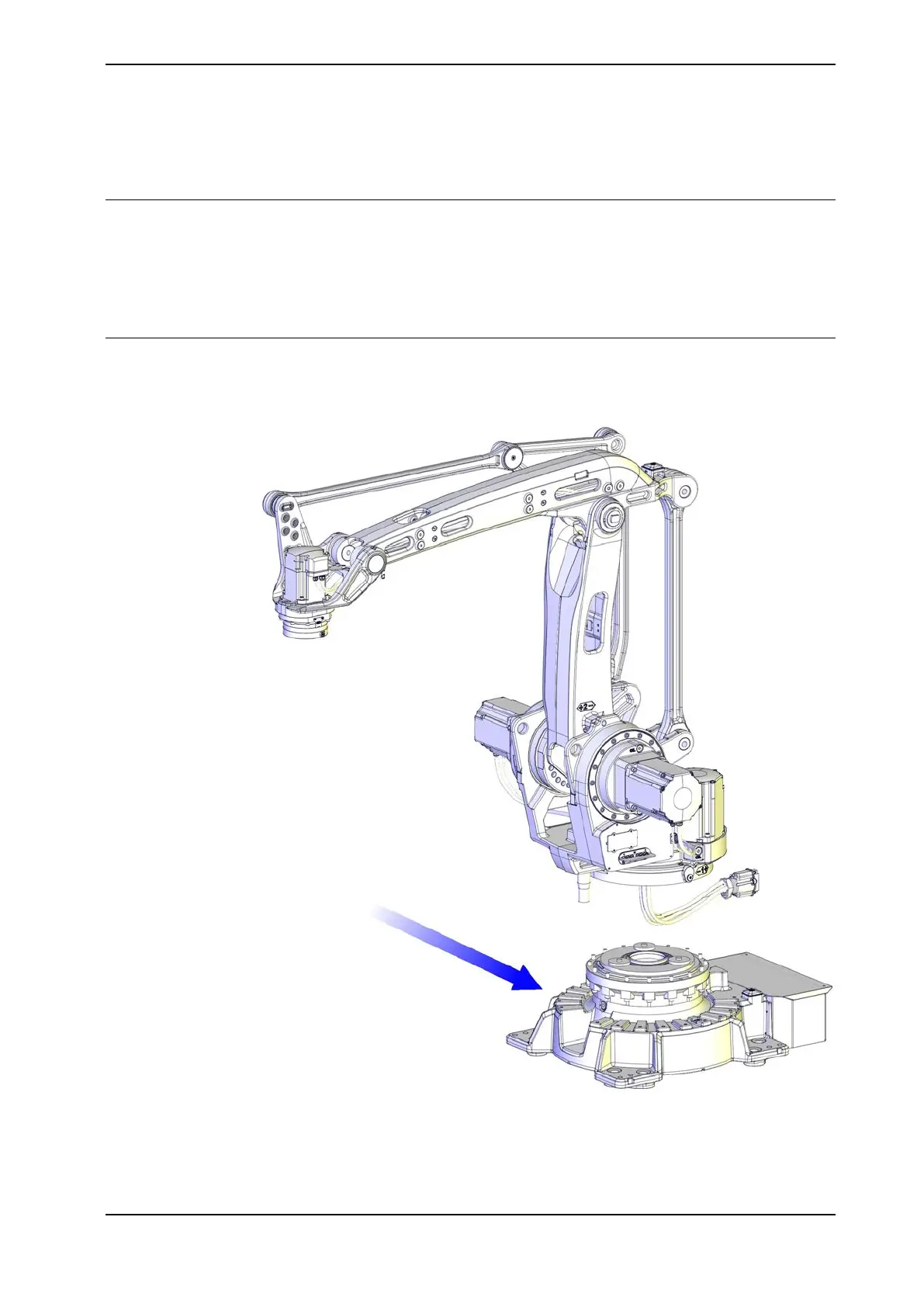
Location of the base
The location of the base, including gearbox axis 1, is shown in the figure. It also
shows the complete arm system as defined above.
xx1100000246
Continues on next page
Product manual - IRB 460 173
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.3.5 Replacing the base, including axis 1 gearbox

 Loading...
Loading...






