2.2.2 Working range and type of motion
Working range
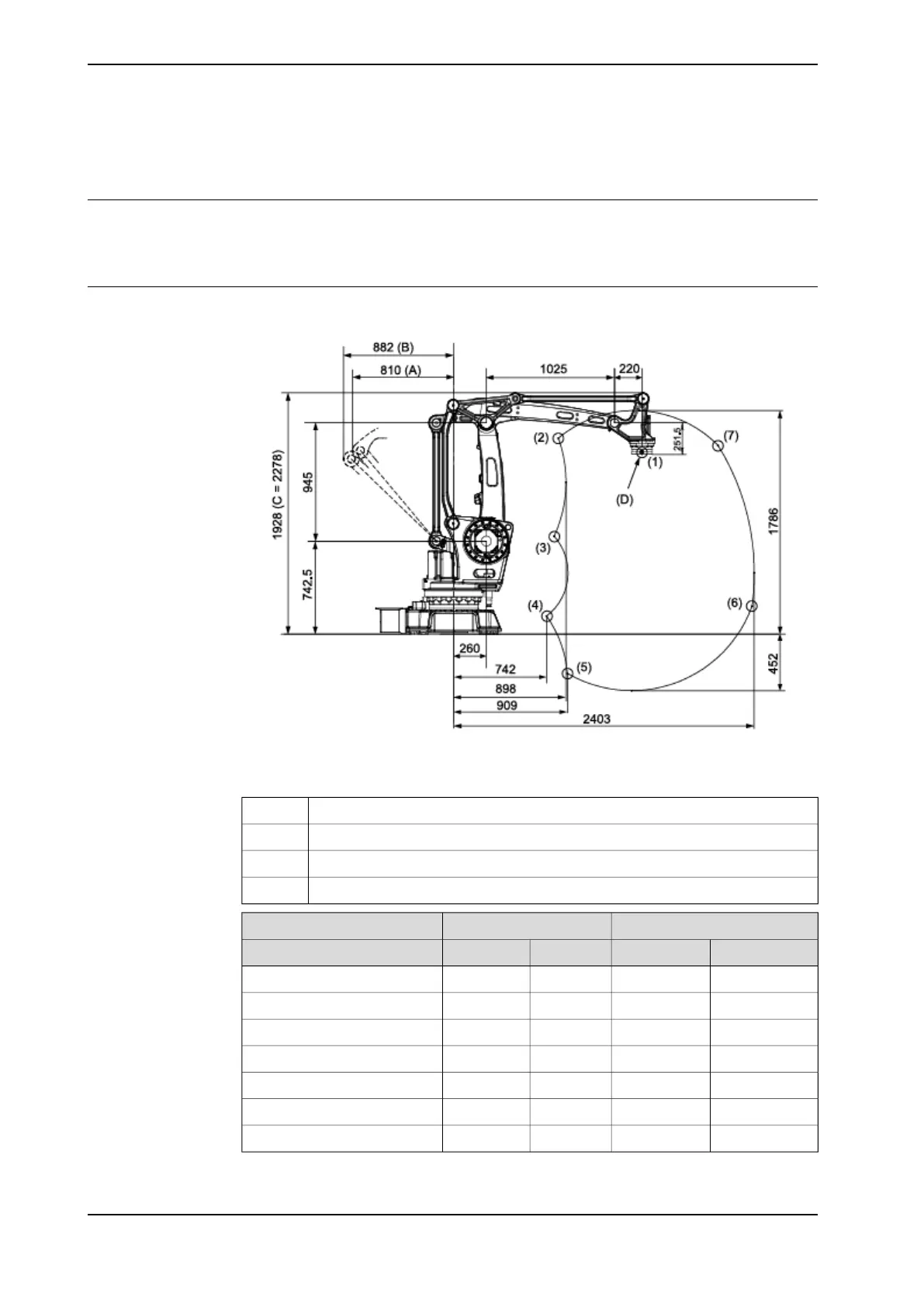
The following figures show the working ranges of the robot variants. The extreme
positions of the robot arm are specified at the wrist center (dimensions in mm).
IRB 460 - 110/2.4
xx1000001043
Maximal working rangeA
Mechanical stopB
Maximal working rangeC
Tool flange centerD
Angles (°)Position (mm)Position in figure
Axis 3Axis 2ZX
00143715051
-20-4015658362
25-407828023
120551457424
12085-3149095
208522323856
-2045151021117
Continues on next page
52 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range and type of motion
 Loading...
Loading...







