Repairs Motor units
Product Manual IRB 640 43
8 Motor units
8.1 General
Each manipulator axis is provided with a motor unit consisting of:
- A synchronous AC motor
- A brake unit
- A feedback unit.
A gear on the output shaft of the motor forms together with the gear on each axis, the
complete gear unit. Dismounting/mounting of the gear unit is described in an earlier
chapter of this manual.
The electro-magnetic brake is built into the motor unit. The brake is released by a
24 V DC supply. For brake release see Section 7, Installation and Commissioning.
The feedback unit consists of a resolver mounted on the motor shaft and is built into
the motor unit in a similar way as the brake.
Power and signal connections to the motor units are via separate cables between
connections points inside the manipulator and each motor. The cables are connected
to the motor units with connectors.
- The feedback unit is fitted by the motor manufacturer and must never be sep-
arated from the motor.
- The communication angle is + 90° (COMOFF=2048).
The motors never need commutating.
- The motor, resolver and brake is to be regarded as an replacement motor unit.
Faulty motor units are repaired by the motor manufacturer at the request of
the ABB Robotics service organisation.
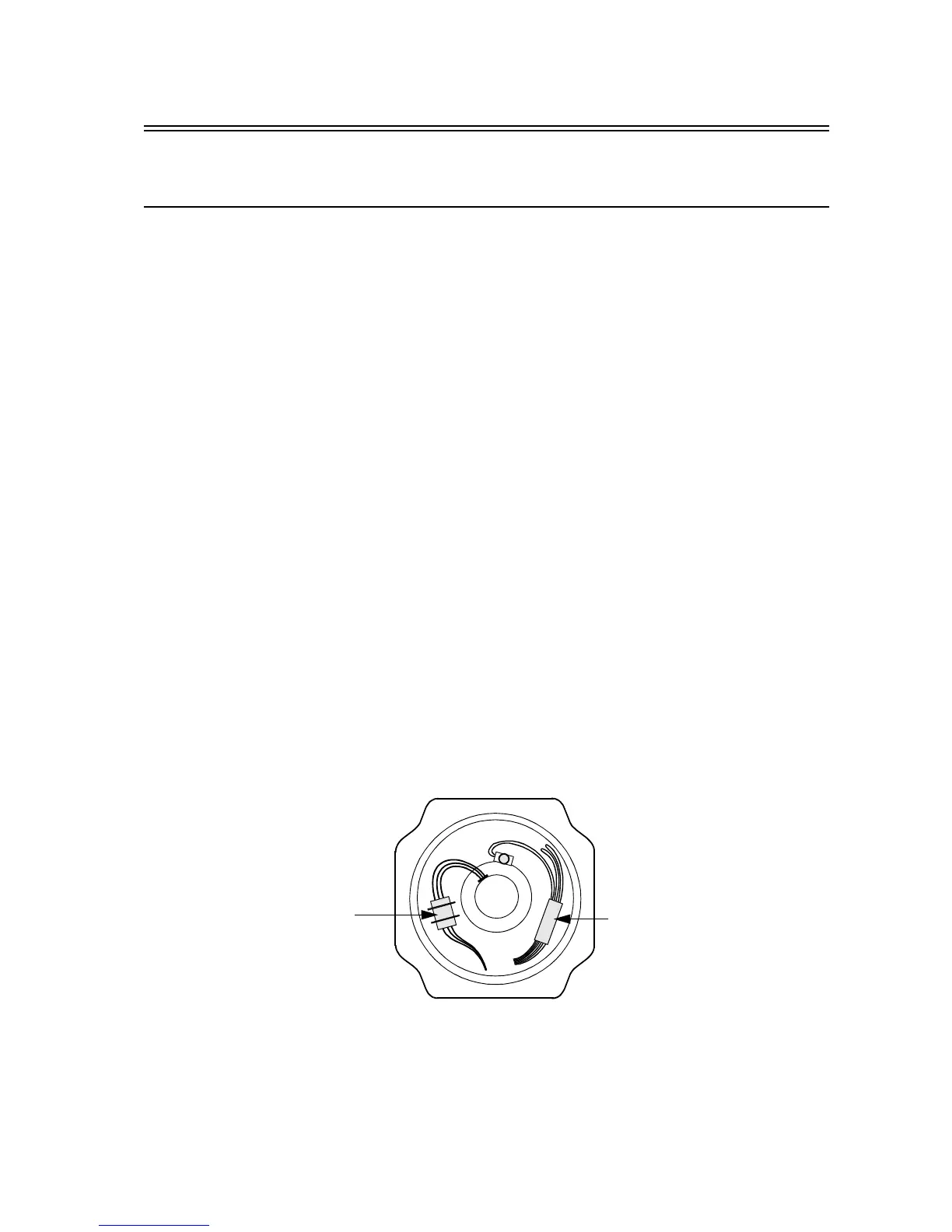
- The cable routing is shown in Figure 8. Note that the signal connection cable
and the power connection cable must not be entwined.
Figure 8 Cable routing in the motor unit.
Power connection
Signal connection
 Loading...
Loading...







