Repairs Calibration
Product Manual IRB 640 51
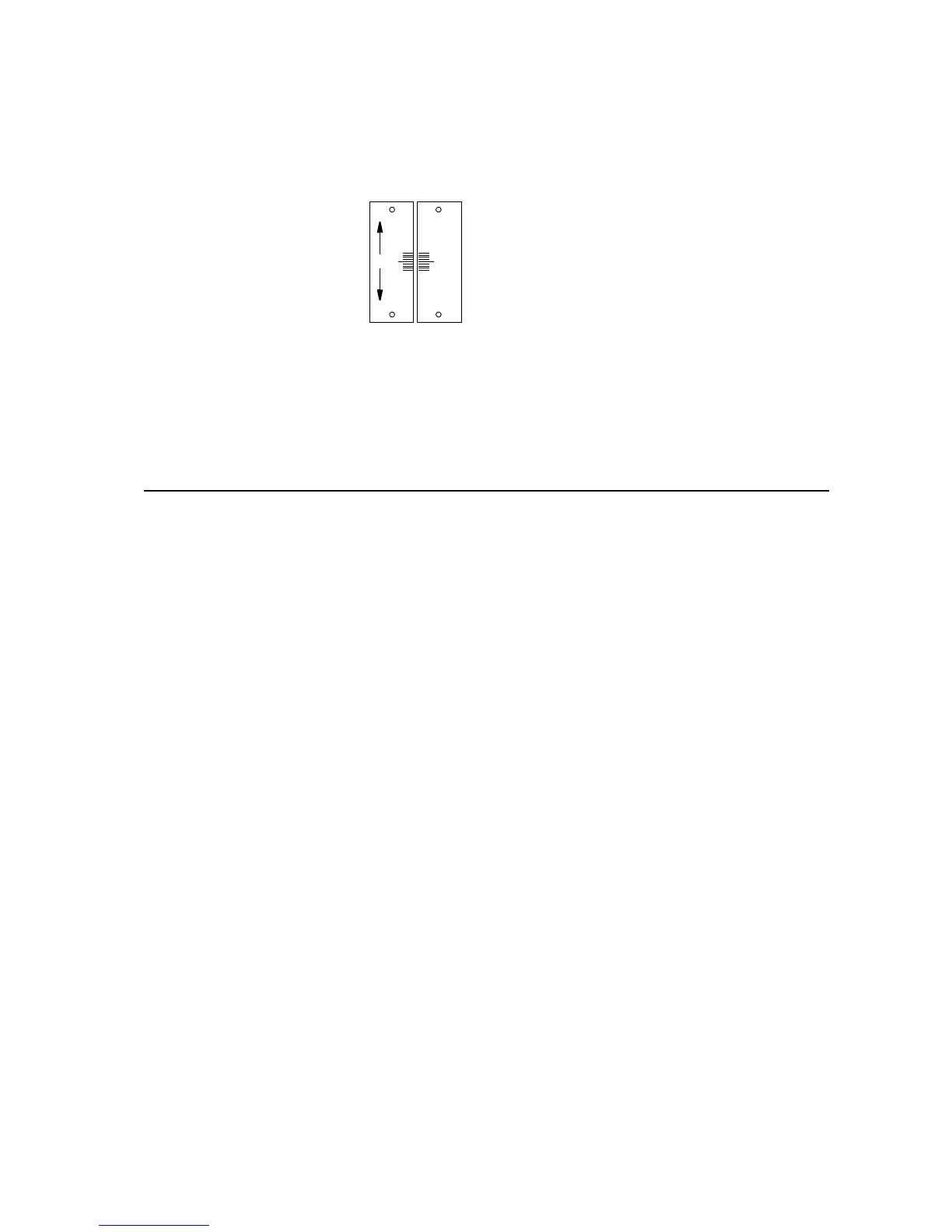
Calibration plate and calibration marks
24. Adjust the calibration plates for axes 1, 2, 3 and 6 (see Figure 17).
Figure 17 Calibration marking.
25. Check the calibration position as described in Chapter 9.5, Checking the calibration
position.
26. Save the system parameters on a floppy disk.
9.3 Aligning the tilt housing
The tilt housing must be aligned after completed calibration of the robot axes,
see Figure 11.
1. Mount sensor fixture 6808 0011-GM on the turning disc, turn the screw around, see
Figure 11.
2. Mount inclination instrument 6807 081-D.
3. Untighten the screw joint for the tilt housing, see Figure 11.
4. Move the tilt housing so that the digital levelling gauge indicates zero. The gauge
should read ±12 increments (0.3 mm/m).
5. Tighten the screw joint again, tightening torque 70 Nm.
6. Check the alignment again.
+
-
*)
*) axis number
 Loading...
Loading...







