10 Rockwell Automation Publication KNX-RM003B-EN-P - March 2019
Kinetix 6000 and Kinetix 6200/6500 Drive Systems
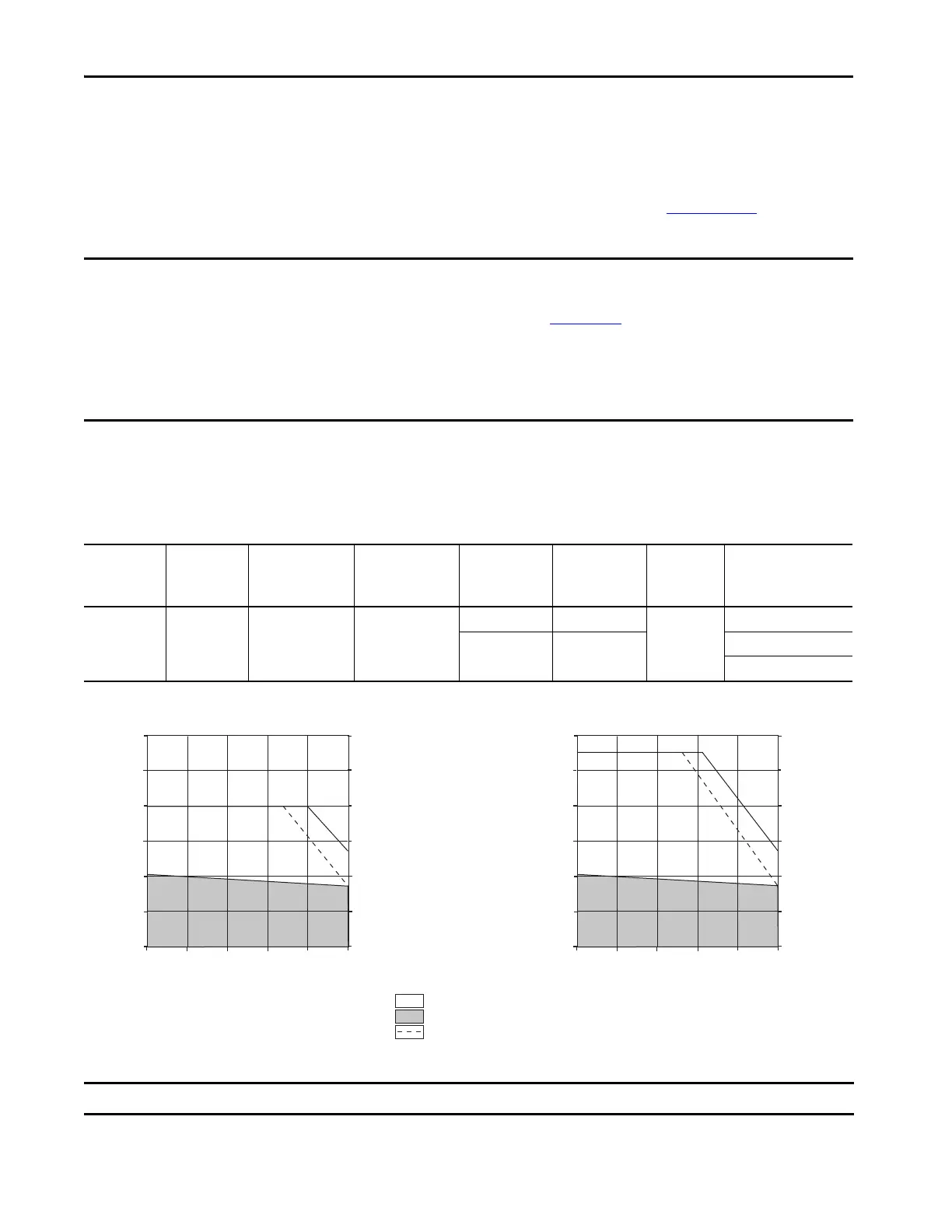
Kinetix 6000 Drive Rotary Performance Example with Peak Enhancement Feature
The peak current ratings of the Kinetix 6000 AM modules (series A, B, and C) are configured at the factory as 150% of continuous
current. You can program 400V-class (series B and C) AM modules, and the equivalent IAM (inverter) modules, to operate with up to
250% of continuous inverter current. See
the Kinetix Servo Drives Technical Data, publication KNX-TD003, for more
information.
In this example, the MPL-B330P motor, usually paired with the 2094-BM02 (series A) AM module, is shown paired
with the 2094-BM01-S (series B or C) AM module. The two curves illustrate how the 2094-BM01-S (series B or C)
drive, when configured for 250% peak, can achieve full motor performance.
Rotary Motor Performance Specifications Example with Kinetix 6000 Drives
IMPORTANT Before your Kinetix 6000 drive can deliver enhanced-peak performance, you must enable the peak enhancement feature by
configuring your drive by using DriveExplorer™ or RSLogix 5000® software, or the Studio 5000 Logix Designer application.
See the Kinetix 6000 Multi-axis Servo Drive User Manual, publication 2094-UM001
, to recalculate torque and acceleration/
deceleration limit values, and paste them into the appropriate Axis Properties dialog box in RSLogix 5000 software or the
Logix Designer application.
For sizing your drive/motor combination when using series B or C drives with the peak enhancement feature, use Motion
Analyzer software, version 4.6 or later.
Rotary Motor
Cat. No.
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Stall Torque
N•m (lb•in)
Motor Rated
Output
kW
Kinetix 6000
400V-class Drives
MPL-B330P 5000 6.10 4.18 (37)
13.0 8.0 (71)
1.8
2094-BM01-S @ 150%
19.0 11.1 (98)
2094-BM01-S @ 250%
2094-BM02-S @ 150%
IMPORTANT The 2094-BC07-M05-S and 2094-BM05-S (series B and C) modules are limited to 200% of continuous inverter current.
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
0
2000
4000
30001000
5000
12.0
10.0
8.0
6.0
4.0
2.0
0
106
88.5
70.8
53.1
35.4
17.7
0
2094-BM01-S @ 150% and MPL-B330P
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC rms input voltage
2094-BM01-S @ 250% or 2094-BM02-S @ 150%
and MPL-B330P

 Loading...
Loading...




