76 Rockwell Automation Publication KNX-RM003B-EN-P - March 2019
Kinetix 6000 and Kinetix 6200/6500 Drive Systems
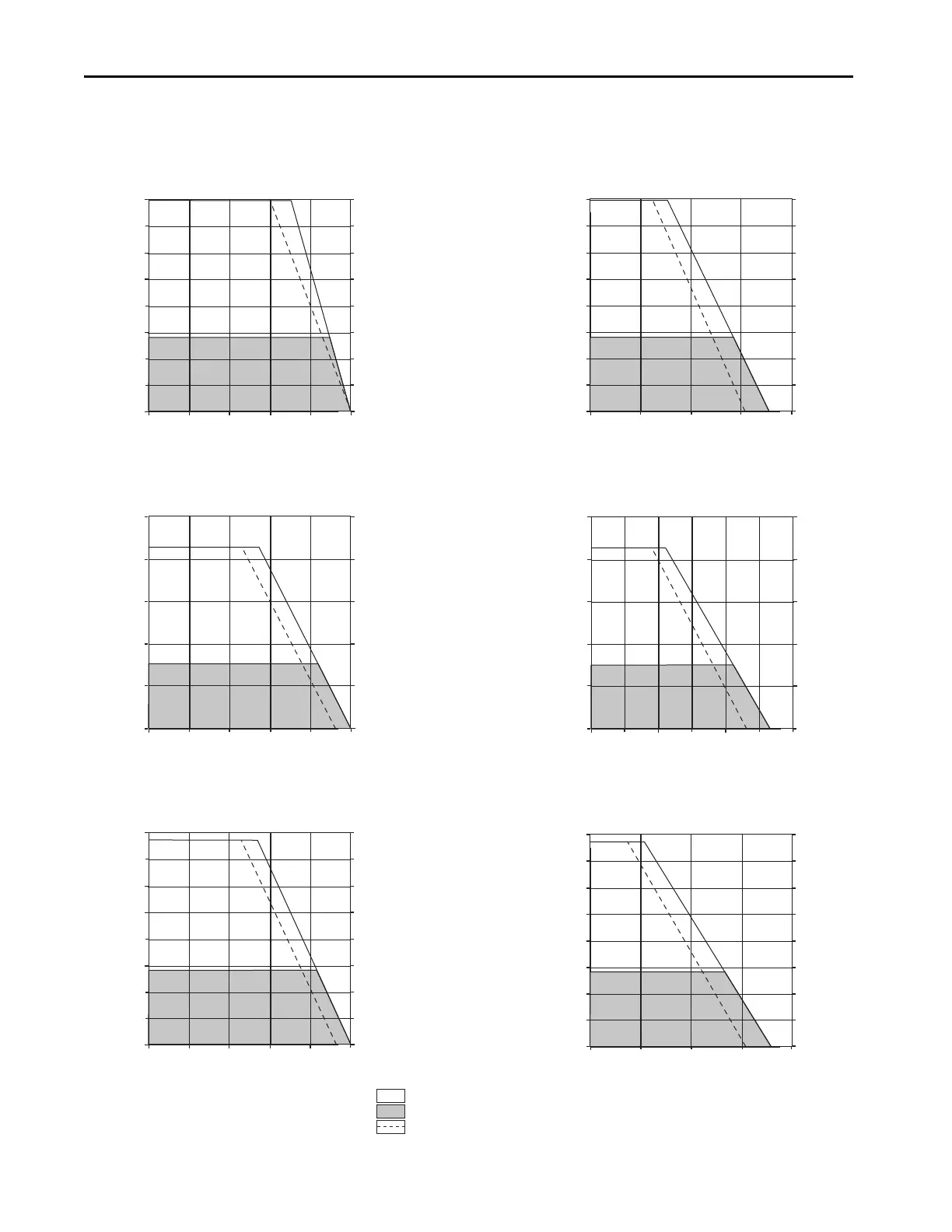
Kinetix 6000 and Kinetix 6200/6500 (400V-class) Drives/LDAT-Series Linear Thruster Curves (continued)
2094-BM03-S or BM03-M
and LDAT-S076070-DBx
Velocity (m/s)
Force
(N)
Force
(lb)
3200
2800
2400
2000
1600
1200
800
400
0
719
629
540
450
360
270
180
89.9
0
0
3
5
41
2
2094-BM02-S or BM02-M
and LDAT-S076070-EBx
Force
(N)
Force
(lb)
3200
2800
2400
2000
1600
1200
800
400
0
719
629
540
450
360
270
180
89.9
0
Velocity (m/s)
0
2
4
31
2094-BM01-S or 2094-BM01-M
and LDAT-S102090-DBx
Velocity (m/s)
Force
(N)
Force
(lb)
0
3
5
41
2
1500
1200
900
600
300
0
337
270
202
135
67.4
0
2094-BMP5-S or 2094-BMP5-M
and LDAT-S102090-EBx
Force
(N)
Force
(lb)
1500
1200
900
600
300
0
337
270
202
135
67.4
0
Velocity (m/s)
0
1.5
2.5
2.00.5
1.0
3.0
= Intermittent operating region
= Continuous operating region
= Drive operation with 400V AC input voltage
2094-BM02-S or 2094-BM02-M
and LDAT-S103090-DBx
Force
(N)
Force
(lb)
2000
1750
1500
1250
1000
750
500
250
0
450
393
337
281
225
169
112
56.2
0
Velocity (m/s)
0
3
5
41
2
2094-BMP5-S or 2094-BMP5-M
and LDAT-S103090-EBx
Force
(N)
Force
(lb)
2000
1750
1500
1250
1000
750
500
250
0
450
393
337
281
225
169
112
56.2
0
Velocity (m/s)
0
1.0
2.0
1.50.5

 Loading...
Loading...




