Installation 4. First Step
T-B series Rev.1 21
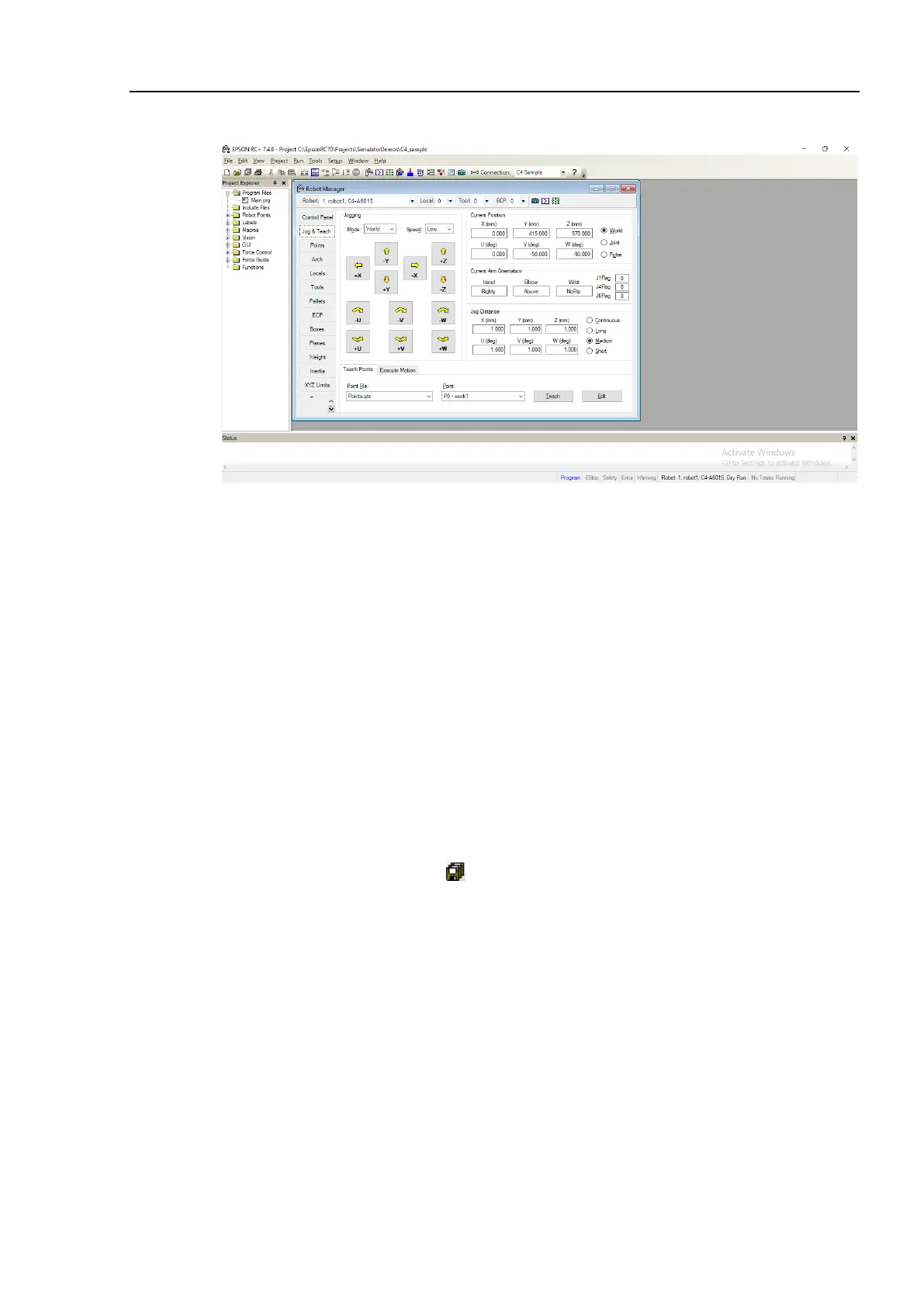
(4) Click the [Jog & Teach] tab.
(5) Click the <Teach> button in the lower right corner to teach point P0. You will be prompted
for a point label and description.
(6) Click the <+Y> jog button to jog the robot in +Y direction. Hold down the button to keep
jogging. Move the Manipulator until it reaches the middle of the work envelope.
(7) Click the <-Z> button to lower the Z axis of the Manipulator.
(8) Select “P1” in the [Point (P)] dropdown list which is next to the <Teach> button. The
current point is set to P1.
(9) Click the <Teach> button. You will see a confirmation message to teach the point.
(10)Click the <Yes> button.
(11)Click the <+X> button to jog the Manipulator in the +X direction.
(12)Select “P2” in the [Point (P)] dropdown list which is next to the <Teach> button. The
current point is set to P2.
(13)Click the <Teach> button. You will see a confirmation message to teach the point.
(14)Click the <Yes> button.
(15)Click the <Save Project> toolbar button to save the changes.
 Loading...
Loading...








