3-24
3-1 Servo Drive Specifications
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
3
Specifications
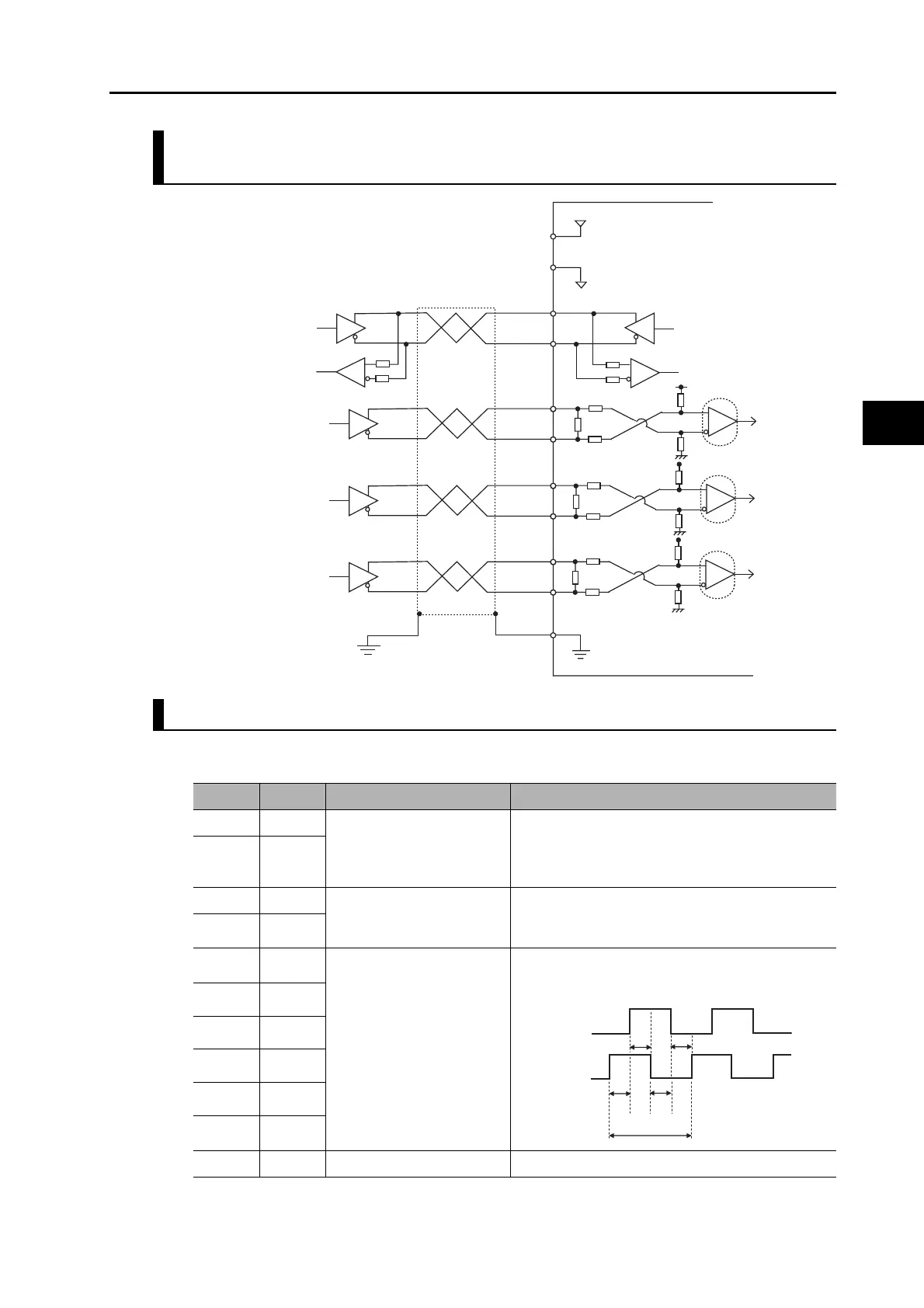
Connection of External Encoder Input Signals and Processing of External
Signals
External Encoder Input Signal Table
External Encoder I/O (CN4)
*1 Connect external encoder signals to the serial interface (+EXS/−EXS) or 90° phase difference inputs
according to the encoder type.
Phase A
PULS
+
EXA
+
EXS
E0V
E5V
5 V
−
EXS
−
EXA
5
1
2
3
4
6
2 k
Ω
Phase B
+
EXB
−
EXB
7
8
Phase Z
+
EXZ
−
EXZ
9
10
Shell
FG
FG
GND
External encoder power supply output
52 V
±
5%
250 mA max
Serial number
120
Ω
2 k
Ω
PULS
2 k
Ω
120
Ω
2 k
Ω
PULS
2 k
Ω
120
Ω
2 k
Ω
20 k
Ω
20 k
Ω
20 k
Ω
20 k
Ω
20 k
Ω
20 k
Ω
Pin No. Symbol Name Function and interface
1 E5V External encoder power
supply output
External encoder power supply: 5.2 VDC ± 5%, 250
mA max.
If the above capacity is exceeded, provide a
separate power supply.
2E0V
3 +EXS External encoder signal
serial interface
This is an external encoder serial bi-directional
signal.
*1
(Conforms to EIA485)
Maximum response frequency: 400 Mpps
4 −EXS
5 +EXA
External encoder signal
90° phase difference input
(Phases A, B and Z)
This is an external encoder 90 phase input signal.
*1
Maximum response frequency: 4 Mpps (quadruple
multiplier)
6 −EXA
7 +EXB
8 −EXB
9 +EXZ
10 −EXZ
Shell FG Frame ground Frame ground
EXA
EXB
t1
t1
t1
t1
t2
t1>0.25 μs
t2>1.0 μs
 Loading...
Loading...
