11-27
11-9 Friction Torque Compensation Function
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
11
Adjustment Functions
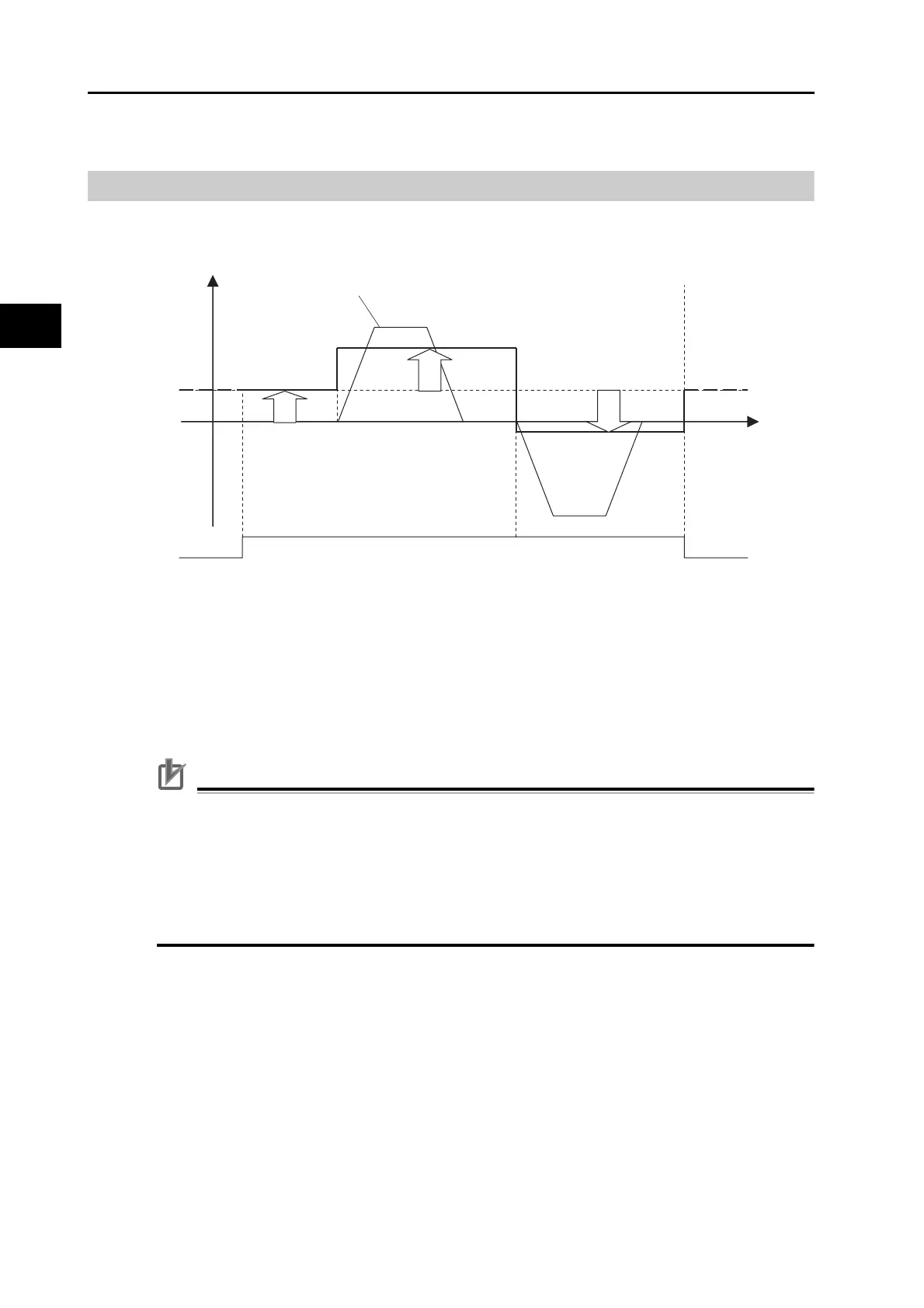
Operation Example
The friction torque compensation is applied in the input direction of the position command as
shown in the drawing below.
The Torque Command Value Offset (3607 hex) reduces the variations of positioning
operations due to the movement directions when a certain amount of unbalanced load torque
is always applied to the motor at the vertical axis by setting the torque command.
By setting the friction torque for each rotation direction in the Forward Direction Torque Offset
(3608 hex) and Reverse Direction Torque Offset (3609 hex), you can reduce the deterioration
of and inconsistencies in the positioning stabilization time due to dynamic friction for loads that
require a large amount of dynamic friction torque due to a radial load, such as the belt-driven
shaft.
Precautions for Correct Use
You can use unbalanced load compensation and the dynamic friction compensation together
or separately. The following application limit applies.
Servo ON
The unbalanced load compensation and the dynamic friction compensation values are held until
the first position command is input. When the position command is input, the unbalanced load
compensation is updated based on 3607 hex. Also, based on the command direction, the dynamic
friction compensation value is updated according to objects 3608 and 3609 hex.
Command speed
Time
Motor
de-energized
Motor
de-energized
Motor power supply
3607 hex
(Torque command
value offset)
Forward
Reverse
3608 hex (Forward Direction
Torque Offset)
3609 hex
(Reverse Direction
Torque Offset)
 Loading...
Loading...
