3-31
3-2 Overload Characteristics (Electronic Thermal Function)
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
3
Specifications
3-2 Overload Characteristics
(Electronic Thermal Function)
An overload protection function (electronic thermal) is built into the Servo Drive to protect the
drive and motor from overloading. If an overload does occur, first eliminate the cause of the
error and then wait at least 1 minute for the motor temperature to drop before turning ON the
power again.
If the error reset is repeated at short intervals, the motor windings may burn out.
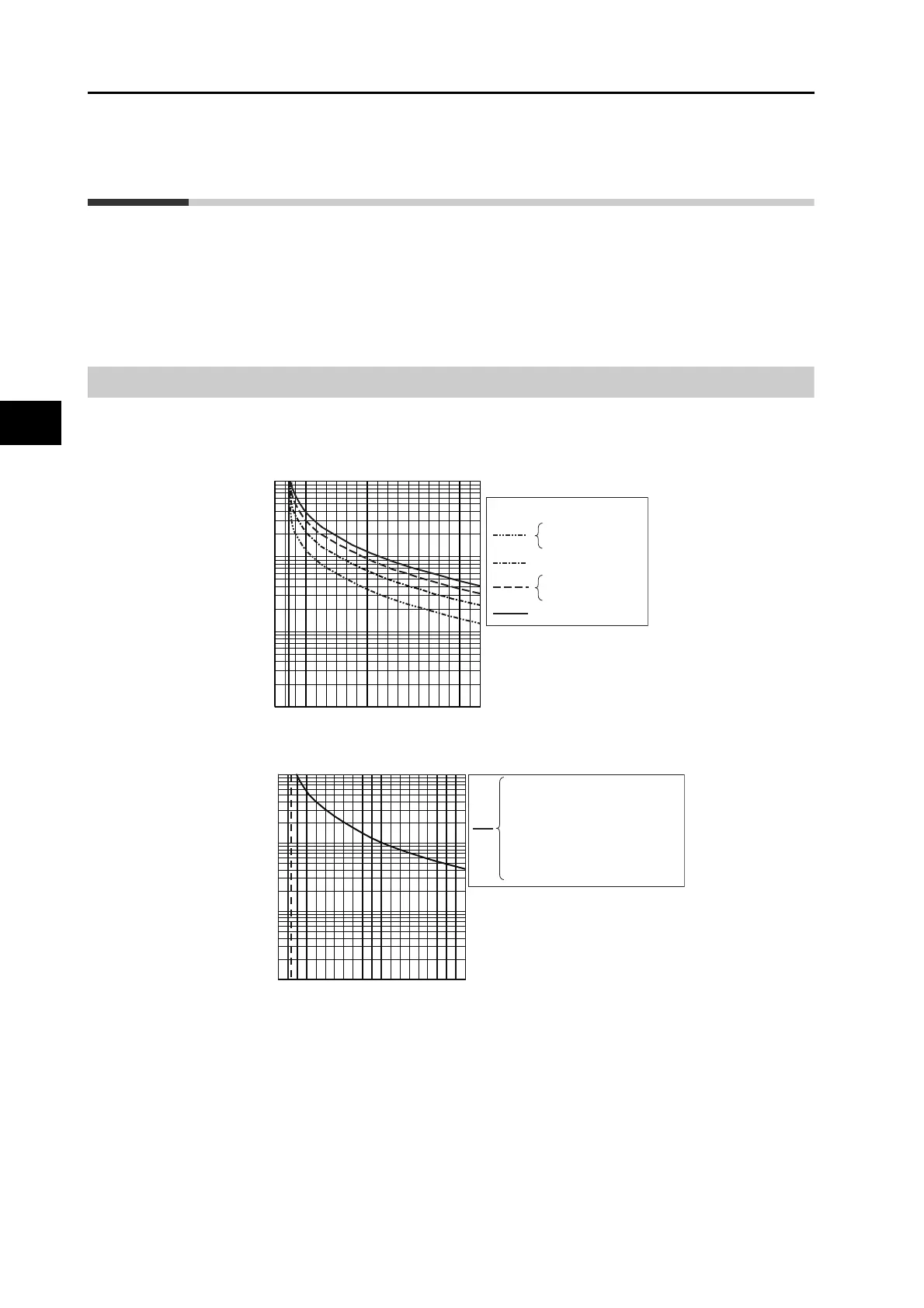
Overload Characteristics Graphs
The following graphs show the characteristics of the load ratio and electronic thermal function's
operation time.
When the torque command = 0, and a constant torque command is continuously applied after
3 or more times the overload time constant has elapsed, the overload time t [s] is
t [s] = −Overload time constant [s] × log
e
(1 − Overload level [%] / Torque command [%])
2
(The overload time constant [s] depends on the motor. The standard overload level is 115%.)
100
0.1
1
10
100
150 200 250 300
Torque [%]
115
Time [s]
50 W
100 W (100 V)
100 W (200 V)
200 W
400 W
750 W
3,000-r/min Servomotors
[100 V, 200 V]
100
115
0.1
1
10
100
150 200 250 300 Torque [%]
Time [s]
[200 V]
3,000-r/min Servomotors 1.0 kW to 1.5 kW
2,000-r/min Servomotors
1,000-r/min Servomotors
[400 V]
3,000-r/min Servomotors
2,000-r/min Servomotors
1,000-r/min Servomotors
 Loading...
Loading...
