6-13
6-6 Fully-closed Control
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
Objects Requiring Settings
Rotation Direction Switching (3000 Hex)
Set the relation between the command direction and the motor rotation direction.
0: Counterclockwise when viewed from the end of the shaft for positive commands
1: Clockwise when viewed from the end of the shaft for positive commands
When object 3000 hex is set to 1, opposite directions will be used for the external encoder
counting direction and the total external encoder feedback pulses and other monitor counts.
Control Mode Selection (3001 Hex)
Select the fully-closed control (set value: 6).
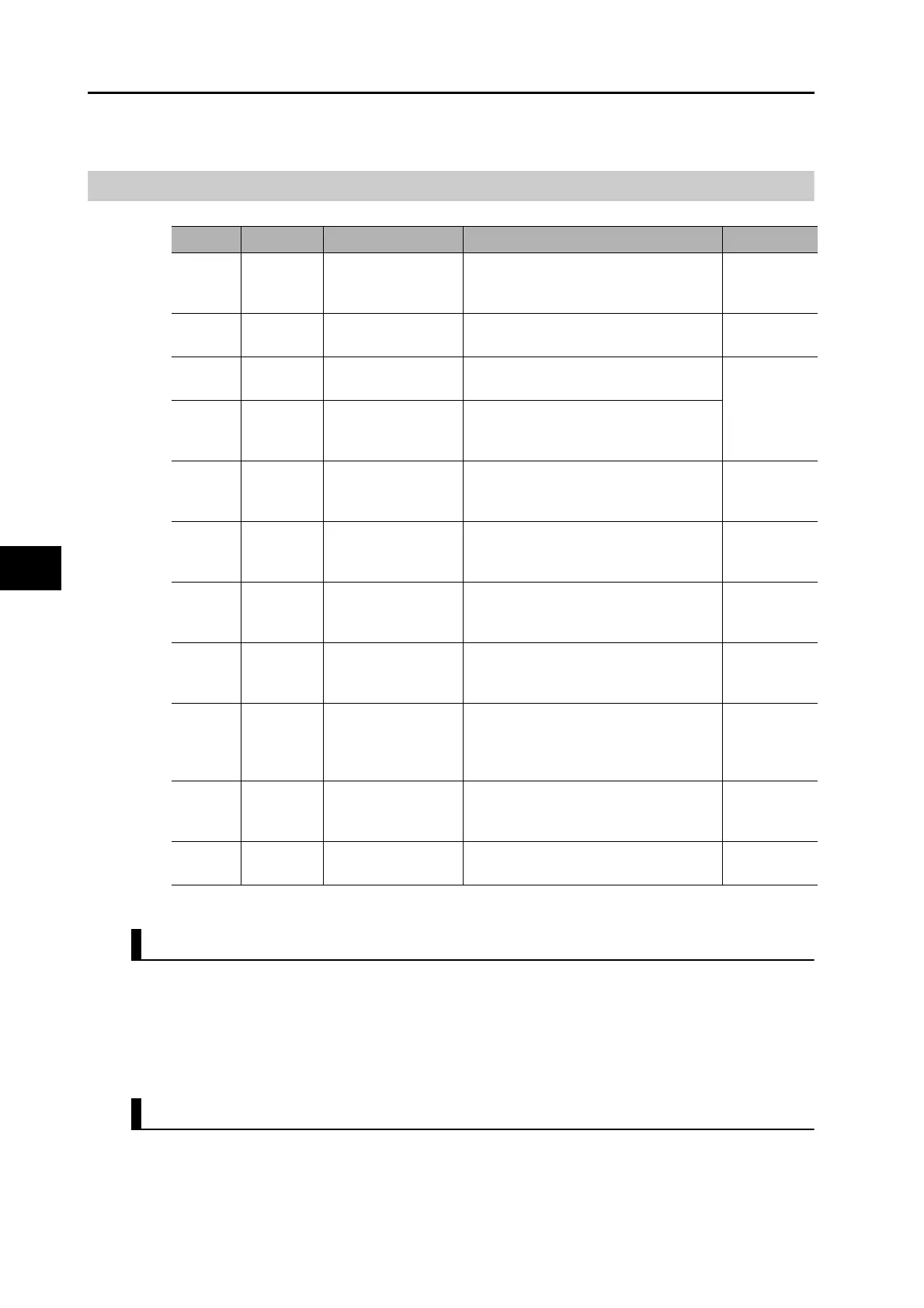
Index Sub-index Name Description Reference
3000 hex
0 Rotation Direction
Switching
Set the relation between the command
direction and the motor rotation
direction.
page 9-1
3001 hex
0 Control Mode
Selection
Select the control mode. page 9-2
6091 hex
1 Motor revolutions Set the numerator of the electronic gear
ratio for the Target position (607A hex).
page 6-44
6091 hex
2 Shaft revolutions Set the denominator of the electronic
gear ratio for the Target position (607A
hex).
3323 hex
0 External Feedback
Pulse Type
Selection
Select the external encoder type. page 9-21
3324 hex
0 External Feedback
Pulse Dividing
Numerator
Set the numerator of the external
feedback pulse divider setting.
page 9-22
3325 hex
0 External Feedback
Pulse Dividing
Denominator
Set the denominator of the external
feedback pulse divider setting.
page 9-22
3326 hex
0 External Feedback
Pulse Direction
Switching
Set the polarity of the external encoder
feedback pulse.
page 9-22
3327 hex
0 External Feedback
Pulse Phase-Z
Setting
Set whether to enable or disable the
disconnection detection function for
phase Z when an external encoder with
a 90° phase difference output is used.
page 9-23
3328 hex
0 Hybrid Following
Error Counter
Overflow Level
Set the threshold for the Excessive
Hybrid Deviation Error (Error 25.0) in the
command unit.
page 9-23
3329 hex
0 Hybrid Following
Error Counter Reset
The hybrid error becomes 0 every time
the motor rotates by the set value.
page 9-23
 Loading...
Loading...
