9-23
9-4 Analog Control Objects
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
Set to enable or disable phase-Z disconnection detection when an external encoder with a 90°
phase difference output is used.
Explanation of Set Values
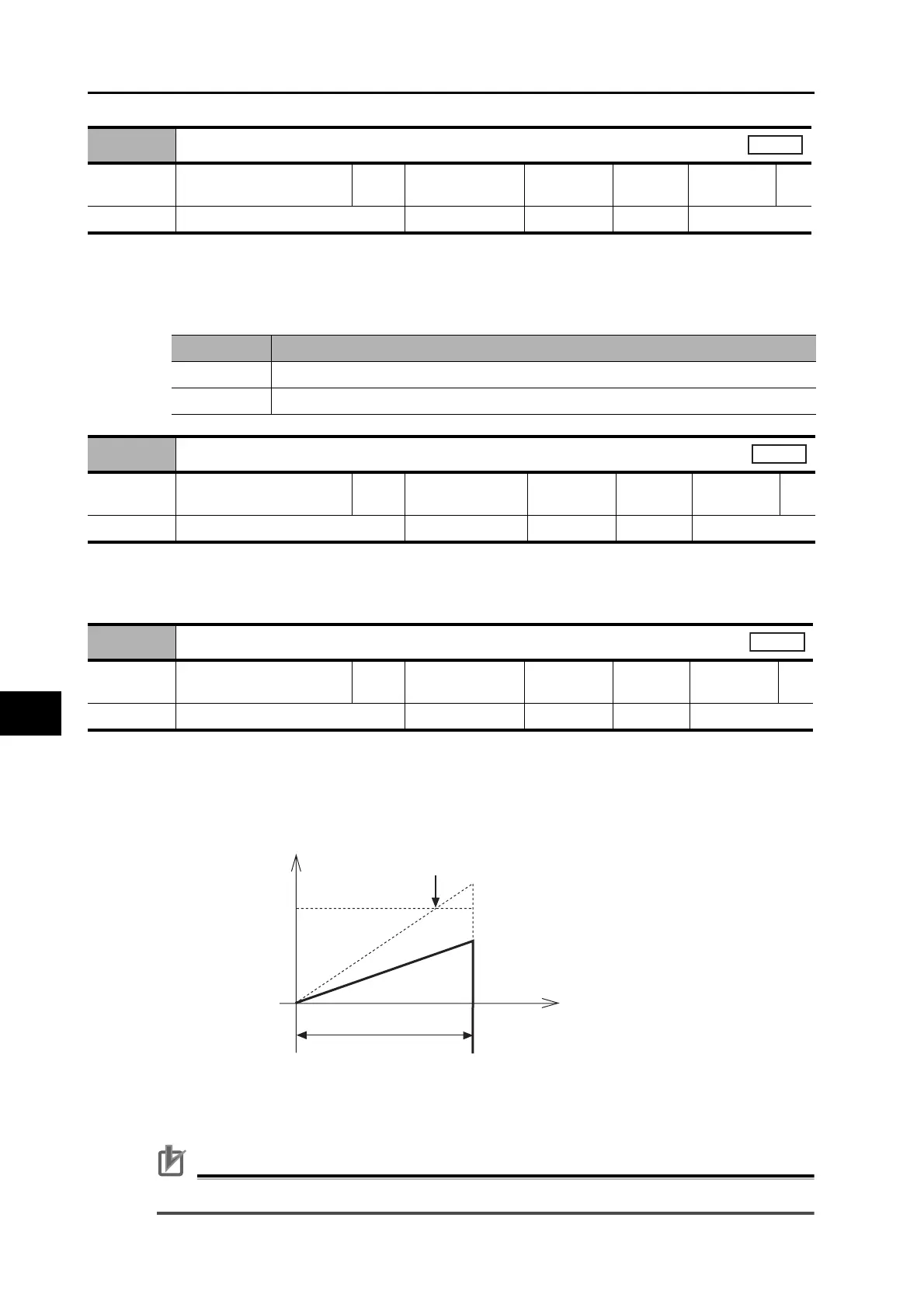
Set the allowable difference (feedback pulse error) between the motor (encoder) position and load
(external encoder) position in command units.
Refer to 6-6 Fully-closed Control on page 6-12.
The feedback pulse error is reset every time the motor rotates for the amount set by the Hybrid
Following Error Counter Reset (3329 hex). This can be used for applications where feedback
pulse error accumulates due to slippage.
Refer to 6-6 Fully-closed Control on page 6-12.
Ensure that an appropriate value is set to the Hybrid Following Error Counter Reset (3329 hex),
before you use the feedback pulse error counter reset. When the set value is extremely small, the
protective function may not work to prevent any erroneous operation due to improper connection
of the external encoder.
Precautions for Correct Use
Provide sufficient safety measures. This includes mounting limit sensors.
3327 hex
External Feedback Pulse Phase-Z Setting
Setting
range
0 to 1 Unit −
Default
setting
0
Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp full
Set value Explanation
0 Phase-Z disconnection detection enabled
1 Phase-Z disconnection detection disabled
3328 hex
Hybrid Following Error Counter Overflow Level
Setting
range
1 to 134217728 Unit Command unit
Default
setting
16000
Data
attribute
C
Size 4 bytes (INT32) Access RW PDO map Not possible.
csp full
3329 hex
Hybrid Following Error Counter Reset
Setting
range
0 to 100 Unit Rotation
Default
setting
0
Data
attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp full
Feedback pulse error value
[command units] (absolute value)
Excessive
feedback pulse
error setting
Occurrence of excessive
feedback pulse deviation error
Motor rotation
speed [rotations]
Feedback pulse error reset setting
 Loading...
Loading...
