9-21
9-4 Analog Control Objects
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
9-4 Analog Control Objects
Select the external encoder type. Be sure that the setting conforms to the external encoder which
is actually used.
Refer to 6-6 Fully-closed Control on page 6-12.
Explanation of Set Values
*1. The maximum input frequency is the feedback speed [pps] of the external encoder that can be
processed by the Drive. Check the instruction manual of the external encoder for the maximum output
frequency of the external encoder.
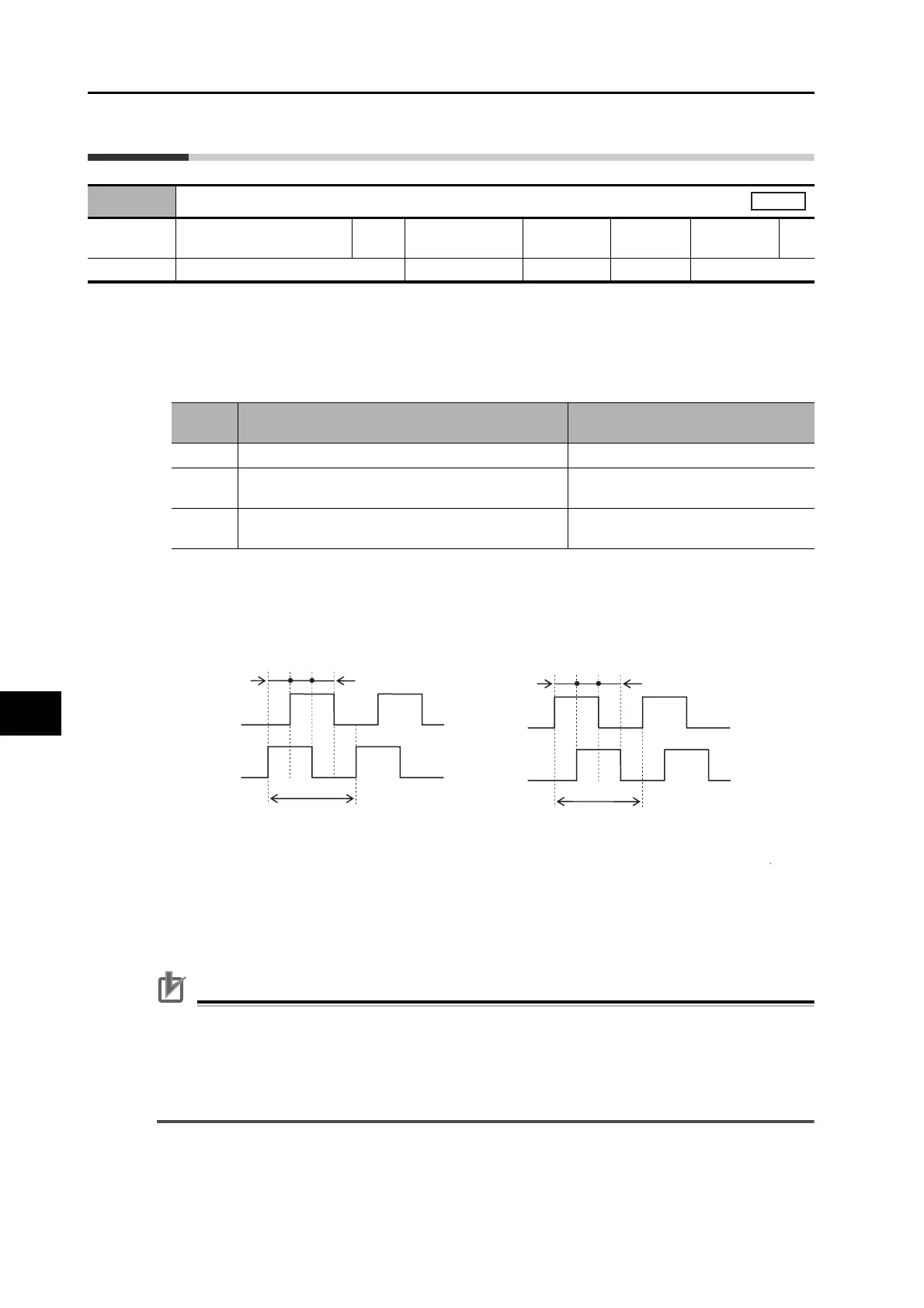
*2. These are the directions that the Drive counts a 90° phase difference output.
*3
For the external encoder connection direction, set the direction so that count-up occurs when the motor
shaft is rotating in the CCW direction, and count-down occurs when the motor shaft is rotating in the CW
direction. If the connection direction cannot be selected due to installation conditions, the count direction
can be reversed using External Feedback Pulse Direction Switching (3326 hex).
Precautions for Correct Use
If 3000 hex = 1, the encoder count direction will be opposite to the count direction used for
monitoring the total external encoder feedback pulses.
If 3000 hex = 0, the count direction matches the count direction for monitoring.
Even when the speed command is within the Drive’s speed command range, an acceleration error
will occur if the speed command exceeds the maximum speed of motor shaft rotation.
3323 hex
External Feedback Pulse Type Selection
Setting
range
0 to 2 Unit −
Default
setting
0
Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp full
Set
value
Description Maximum input frequency
*1
0
90° phase difference output type
*2*3
0 to 4 Mpps (Multiplication × 4)
1
Serial communications type
(Incremental encoder specifications)
0 to 400 Mpps
2
Serial communications type
(Absolute encoder specifications)
0 to 400 Mpps
Count-down direction Count-up direction
EXB is 90° ahead of EXA.
t1 > 0.25 µs
t2 > 1.0 µs
EXB is 90° behind EXA.
t1 > 0.25 µs
t2 > 1.0 µs
t1
t2
t1
t2
EXA
EXB
EXA
EXB
 Loading...
Loading...
