6-17
6-6 Fully-closed Control
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
Hybrid Error Setting (3328 Hex, 3329 Hex)
The difference between the encoder position and external encoder position is detected, and if
the difference exceeds the value of Hybrid Following Error Counter Overflow Level (3328 hex),
an error occurs.
3329 Hex: Hybrid Following Error Counter Reset
The hybrid error is cleared every time the motor rotates by the amount set in object 3329 hex.
This function can be used when there is error between the position calculated from encoder
pulses and the position calculated from external encoder because hybrid error accumulated
due to slipping or other factors.
Precautions for Correct Use
The machine may run out of control and be damaged if the external encoder breaks down or the
motor or load coupling becomes disconnected. To prevent this from happening, set the Hybrid
Following Error Counter Overflow Level (3328 hex) and Hybrid Following Error Counter Reset
(3329 hex).
If the Hybrid Following Error Counter Overflow Level (3328 hex) is set too high, detection is
delayed and error detection will be ineffective. If an extremely small value is set, the amount of
motor or machine torsion during normal operation may be detected as an error. Be sure to set an
appropriate value.
Take sufficient safety measures, such as installing limit sensors.
Index Name Description Setting range Unit
3328 hex
Hybrid Following
Error Counter
Overflow Level
Set the allowable difference
(hybrid error) between the
encoder-detected position and
external encoder-detected
position in command units.
1 to 2
27
Command
units
3329 hex
Hybrid Following
Error Counter Reset
The hybrid error becomes 0 every
time the motor rotates by the set
value.
If the set value is 0, the hybrid
error is not cleared.
0 to 100 Rotations
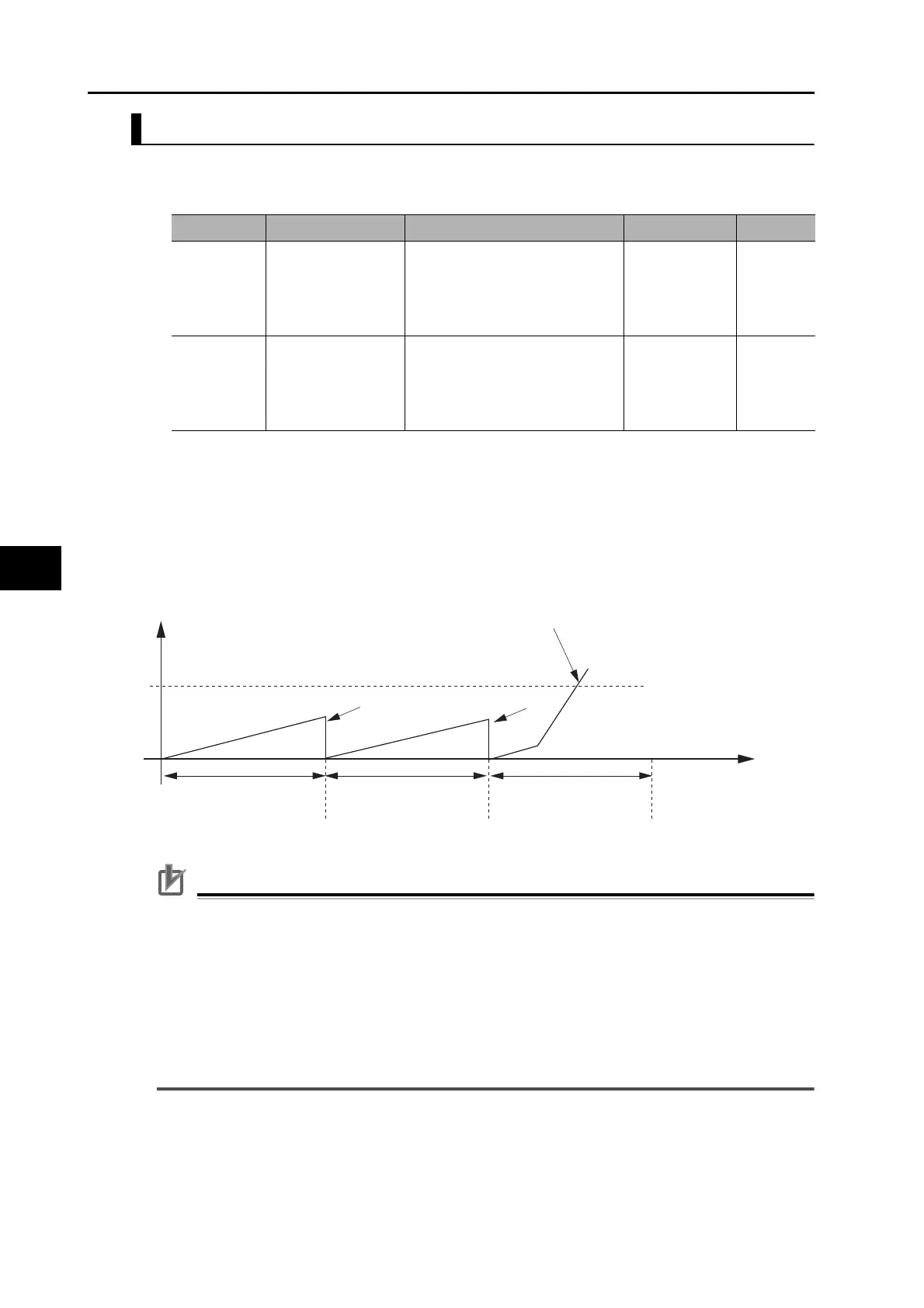
mount of hybrid error
[Command units]
Error detected
3328 hex: Hybrid Following Error Counter Overflow Level
3329 hex
Hybrid Following Error
Counter Reset
3329 hex
Hybrid Following Error
Counter Reset
3329 hex
Hybrid Following
Error Counter Reset
Cleared to 0.
Cleared to 0.
Number of motor
rotations
[rotations]
 Loading...
Loading...
