6-38
6-7 Object Dictionary
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
6
Drive Profile
Bit Descriptions
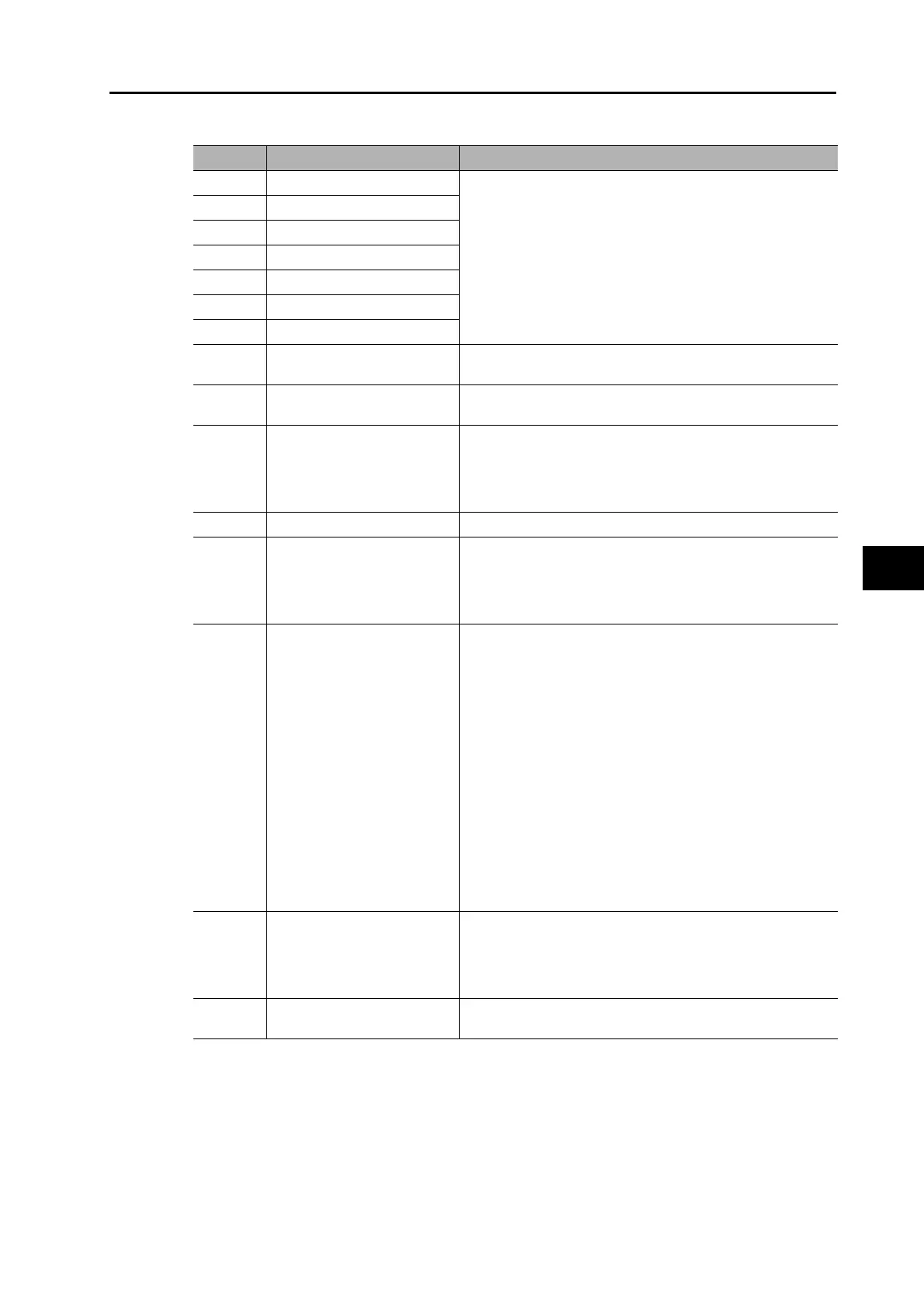
Bit Name Description
0 Ready to switch on These bits give the state.
For details, refer to State Coding on page 6-3.
1 Switched on
2 Operation enabled
3 Fault
4 Voltage enabled
*1
5 Quick Stop
*2
6 Switch on disabled
7
Warning This bit indicates that warning status exists. Operation continues
without changing the status.
8
Manufacturer specific These are manufacturer specific bits. This bit is not used by
OMNUC G5-series Servo Drives.
9
Remote This bit indicates that the Servo Drive is being controlled by the
Controlword.
Changes to 1 (remote) after initialization has been completed.
When 0 (local) is given, it indicates that the support software has the
control right to the Servo Drive.
10 Target reached This bit is not used in Cyclic synchronous position mode.
11
Internal limit active This bit indicates that the limit function is in effect.
This bit becomes 1 when the limit function in the Servo Drive is
activated.
The limit function has four limits, the torque limit, speed limit, drive
prohibition input, and software limit.
12
Target value ignored This bit indicates that the target position was ignored.
The Target Value Ignored bit becomes 0 when the Servo Drive
could not move according to the host's command while in the Servo
ON state and in csp mode. This bit will not become 0 if there is an
error. When the Target Position Ignored bit is 0, the target position
is ignored and operation will follow the Servo Drive's internal
commands. Update the target position in the controller while
monitoring items such as the Position actual value for operation
when the Target Value Ignored bit changes to 1 and the target
position is enabled. It becomes 0 in the following cases.
Between when the drive prohibition input (PLS/NLS) is input until
when the Servomotor decelerates and stops when the Drive
Prohibition Input Setting (3504 hex) is set to 0.
When a drive prohibition direction command is received while in
a drive prohibition state.
When there is a change in position command that exceeds the
motor's maximum speed.
13
Following error The Following error (Error counter overflow) is indicated in Cyclic
synchronous position mode.
Position Error Counter Overflow is set to 1 when the Position actual
value (6064 hex) exceeds the Following error window (6065 hex)
that is set based on Position demand value (6062 hex).
14 and 15
Manufacturer specific These are manufacturer specific bits. This bit is not used by
OMNUC G5-series Servo Drives.
*1. The Voltage enabled bit indicates that the main circuit power supply is ON when it is 1.
*2. Not applicable in Quick stop active state. This bit is 0 in a “Not ready to switch ON” state only. It is always 1 in all
other cases.
 Loading...
Loading...
