7
7-28
7-8 Gain Switching Function
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
Applied Functions
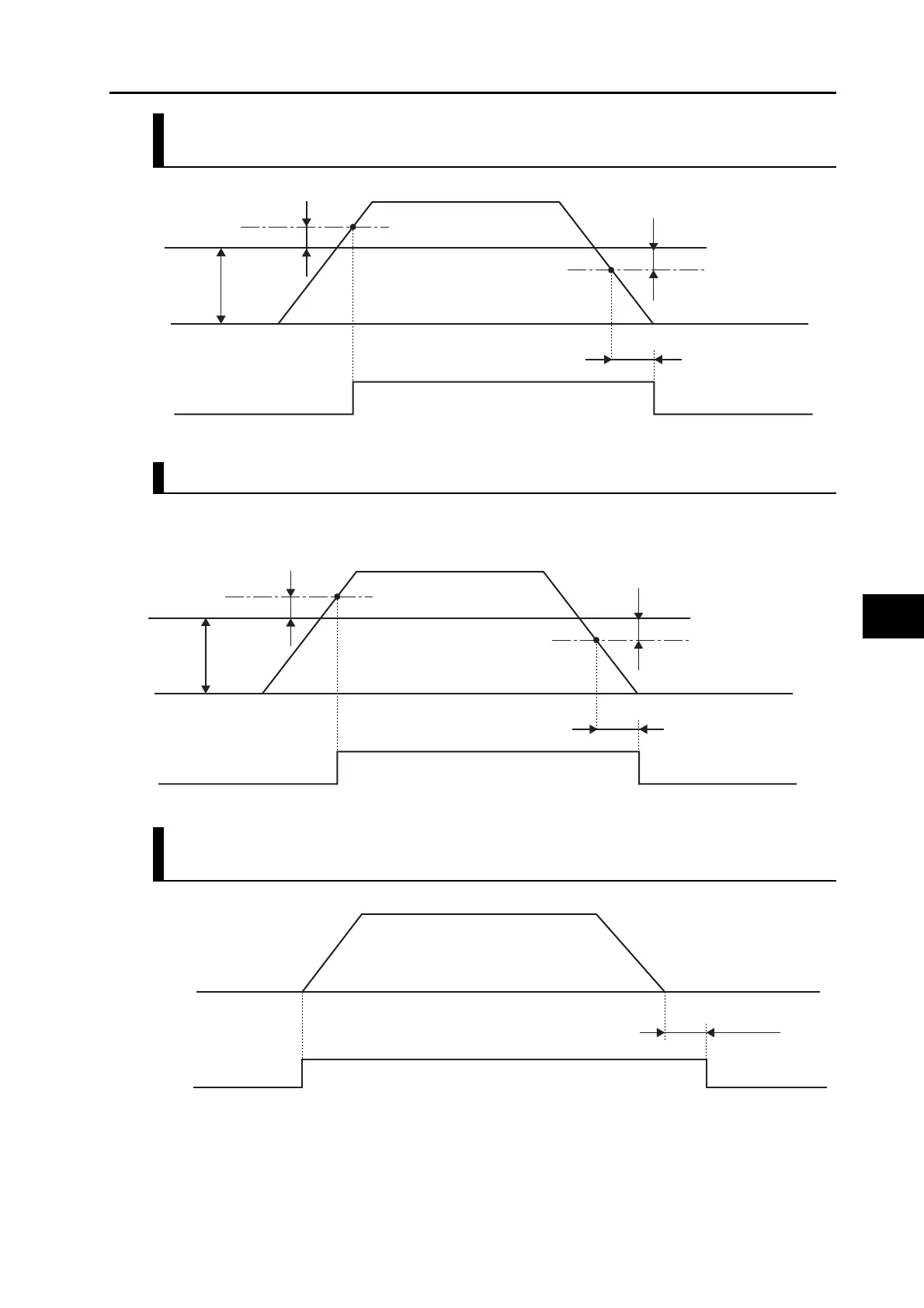
Gain Switching Mode = 5 or 9: Switching by Speed Command or Actual
Motor Speed
Note: The “speed command” is the Motor Control Effort (401A hex) [r/min].
Gain Switching Mode = 6: Switching by Pulse Position Error
The gain is switched according to the pulse position error [encoder pulses/external encoder
pulses].
Gain Switching Mode = 7: Switching by Whether There Is a Position
Command
The gain is switched according to whether there is a position command.
Note: Whether there is a position command is determined by changes in the Target position (607A hex).
3118 hex
3117 hex
3118 hex
3116 hex
Gain 1
Gain 1
Gain 2
Speed command or actual motor speed
Pulse position error
3118 hex
3118 hex
3116 hex
3117 hex
Gain 1
Gain 1
Gain 2
Gain 1 Gain 1
Gain 2
3116h
Position command
 Loading...
Loading...
