18.EtherCAT COMMUNICATION
18.3 PDO (PROCESS DATA OBJECT) COMMUNICATION
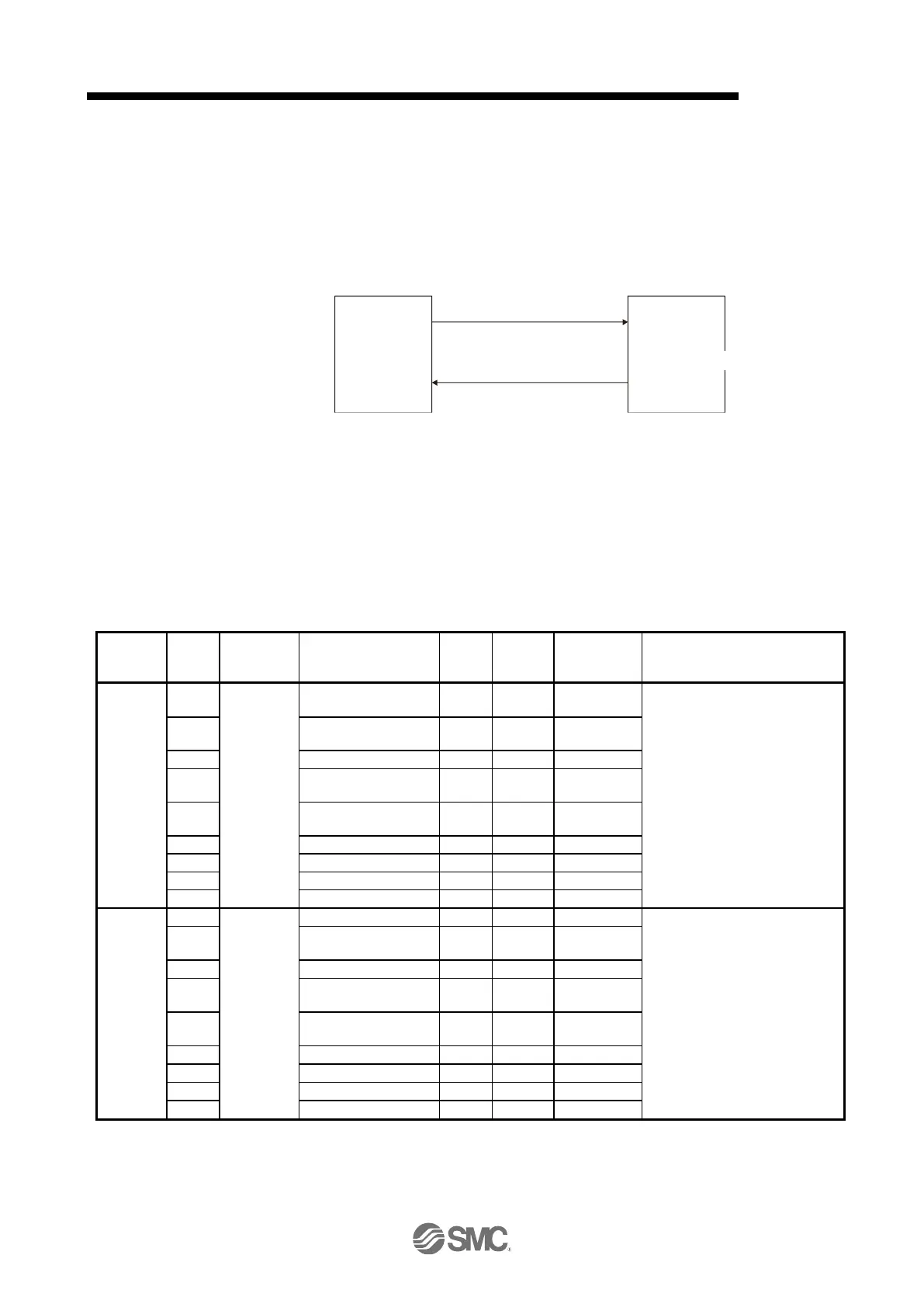
The PDO (process data object) communication can transfer command data and feedback data between a
master (upper side) and slaves (driver) at a constant cycle. PDOs include RxPDOs, which are used by the
slaves to receive data from the upper side, and TxPDOs, which are used by the slaves to send data to the
upper side.
Master
(controller)
Communication at a constant period
Command data (RxPDO)
Status data (TxPDO)
Slave
(servo amplifier)
The variable PDO mapping function enables the PDO communication to transfer multiple PDOs in any array.
18.3.1 PDO communication cycle
The same cycle is applied to communication of RxPDOs and TxPDOs of the driver.
The communication cycle can be changed via a network through rewriting the sub object Cycle time (Sub
index = 2) of SM output parameter (1C32h) with SDO download in the Pre Operational state.
18.3.2 PDO setting-related object
The following table lists the objects related to the PDO setting.
Refer to section 7.3.3 (4).
Synchronization types
supported
Refer to section 7.3.3 (5).
Synchronization types
supported
No value can be written because Shift time (1C32: 3, 1C33: 3) is set automatically. Writing any value causes SDO Abort Code
(0609 0030h Value range of parameter exceeded).

 Loading...
Loading...









