20.PROFINET COMMUNICATION
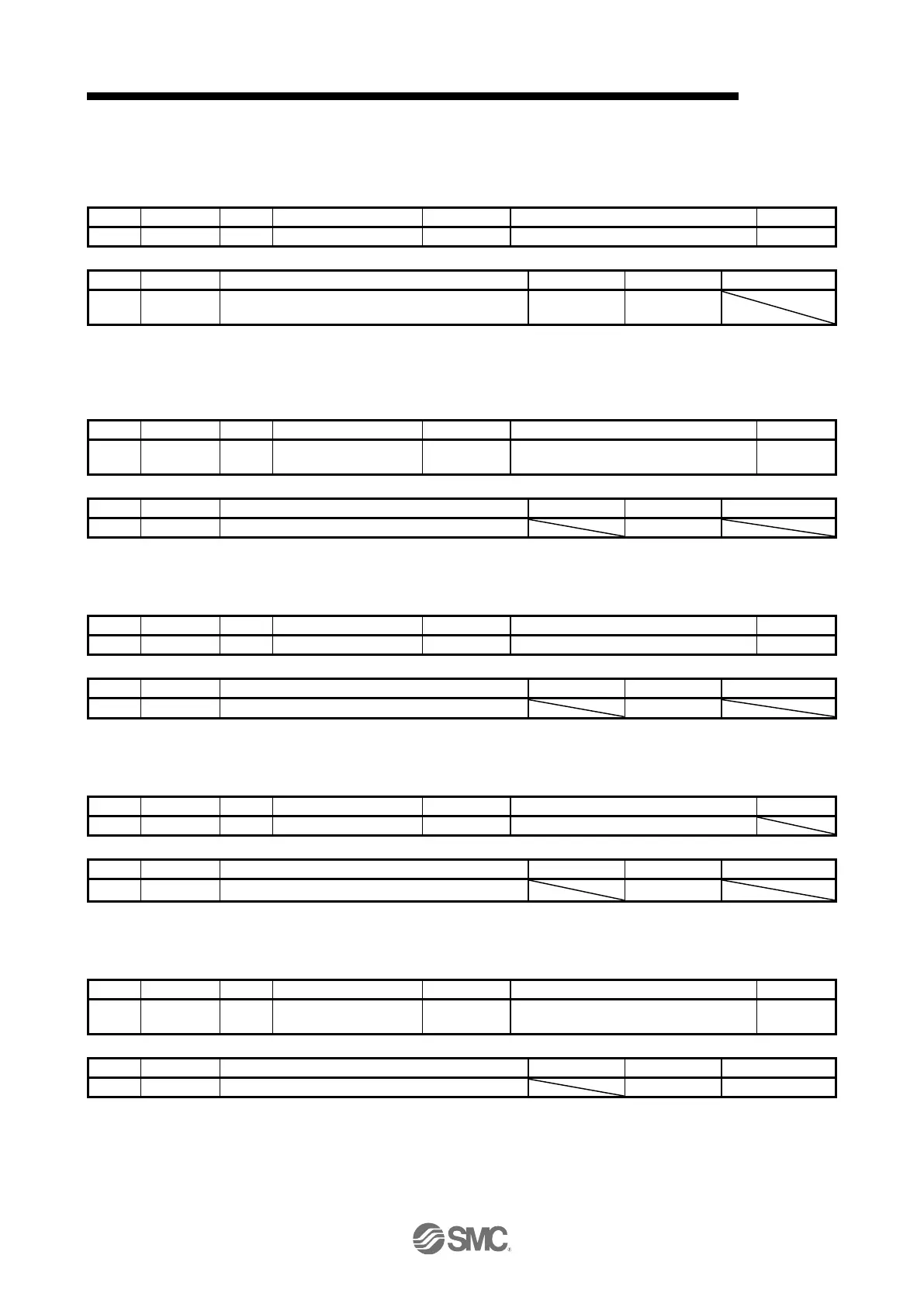
(32) Torque limit value 2 (P11627)
The generated torque at a servo motor stop in the indexer method can be limited. Set this parameter to
"0" to generate no torque.
Per thousand
of rated torque
20.9.3.6 PDS Control Objects
(1) Error code (P24639)
The latest error No. that occurred after the power on is returned.
The latest error No. that occurred after the
power on
(2) Controlword (P24640)
Set control commands to control the driver. Refer to section 5.3.1 for details.
(3) Statusword (P24641)
The servo status is returned. Refer to section 5.3.2 for details.
(4) Quick stop option code (P24666)
Set how to decelerate the servo motor to a stop at Quick Stop reception. Refer to section 8.10 for details.
How to decelerate the servo motor to a
stop at Quick Stop reception