137
Inertia identification and internal
instruction auto-tuning max speed
Auto-tuning
setting
parameters
auto-tuning min limit position
auto-tuning max limit position
auto-tuning acceleration/deceleration
time
Note: P2-60~P2-63 are automatically modified in auto-tuning process. Users are not allowed to modify
them manually. Manual modification may lead to the risk of system runaway.
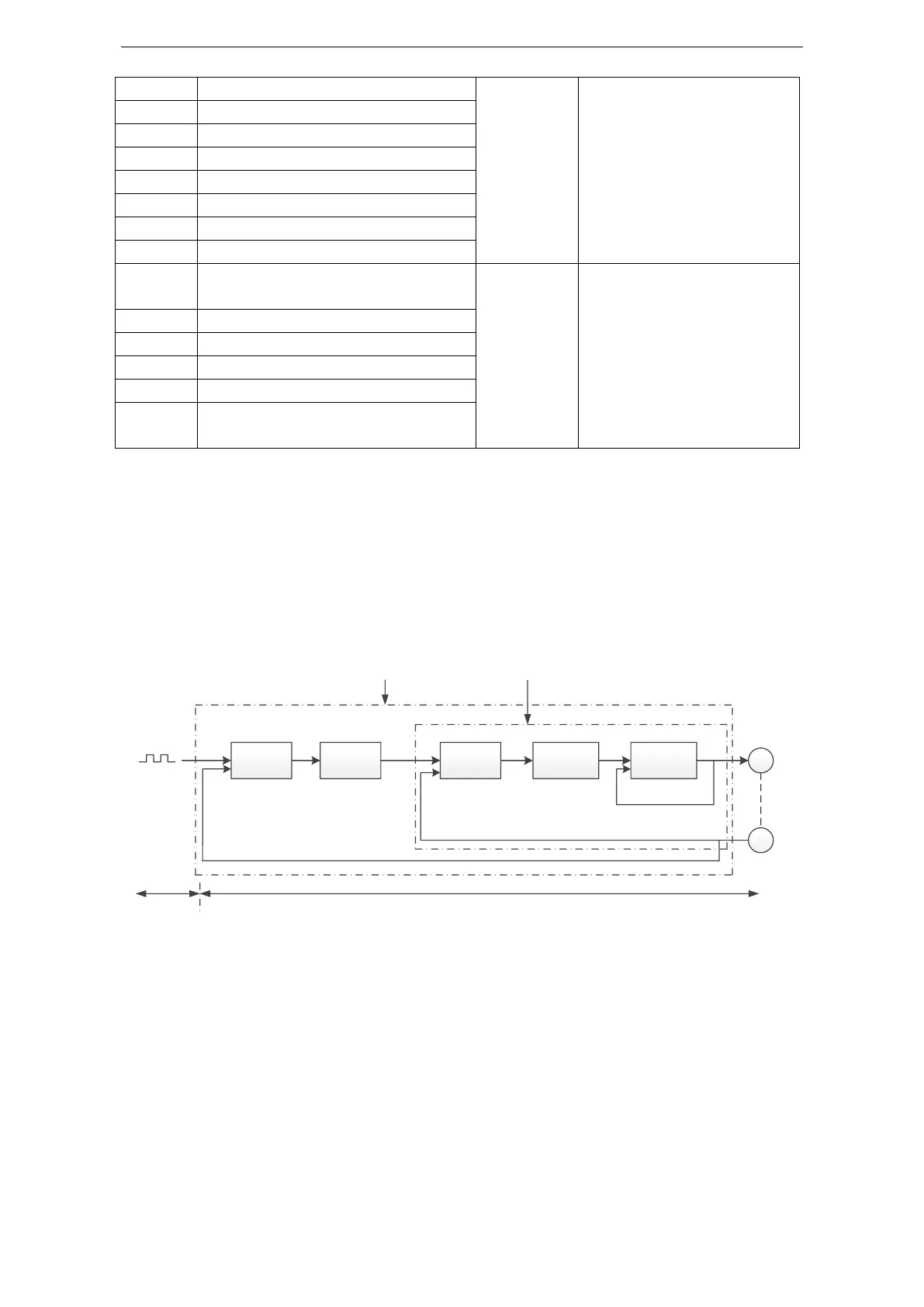
6.5 Manual adjustment
6.5.1 Overview
error
counter
Position
loop gain
Kp
Speed
control Kv,
Ti
Torque
instruction
filter Tf
Current
control
M
PG
Servo motor
encoder
Current loop
Speed loop
Speed
instruction
Position
loop
+
-
+
-
+
-
Pulse
instruction
Upper device Servo unit
Position
control loop
Speed
control loop
Position control loop diagram (shut down the model loop)
 Loading...
Loading...

