80
5.3.3.6 Set segment thorugh communication
Set the segment
number through
communication
If this parameter is set to a certain segment number, this segment position will be executed without
step change signal. Communication can be used to modify parameters.
For example: to execute the second segment position, set F2-09 = 0, and then F2-09 = 02.
5.3.3.7 Motion start signal (/MRUN)
Terminal output is not
assigned by default.
It is only valid in the internal
position mode, similar to the
positioning completion signal
in the external pulse mode;
there is output when the motor
is running, and there is no
output when the motor stops.
Parameter range 0000-0018,
assigned to the output interface
through parameter P5-50. When
it is set to 0001, the signal is
output from SO1 terminal.
5.4 Speed control
5.4.1 Speed mode general control
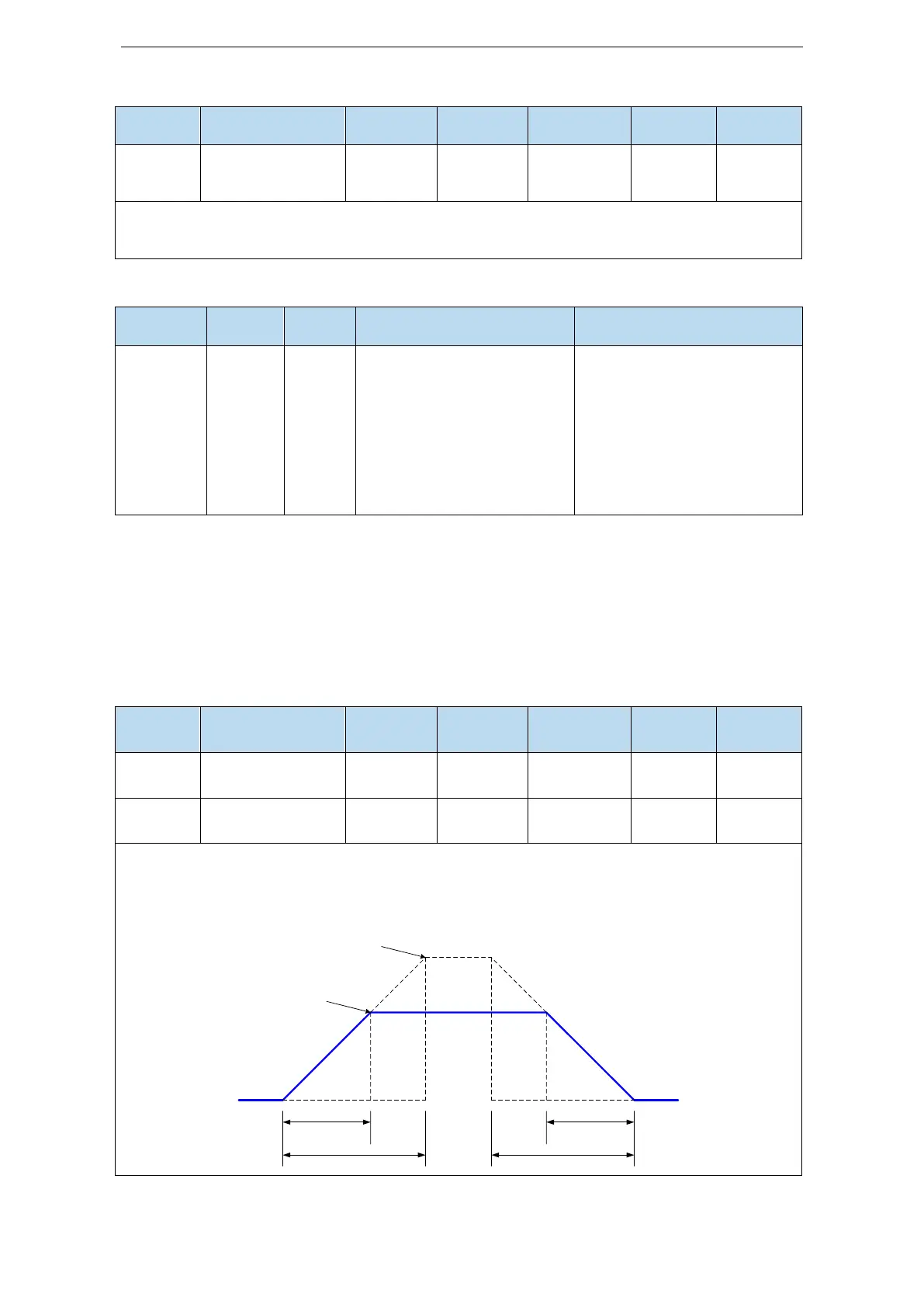
5.4.1.1 Soft start
Soft Start
Acceleration Time
Soft Start
deceleration Time
Soft start acceleration and deceleration time is suitable for mode 3/4/7. Smooth speed control can be
carried out when step speed instruction is input or internal setting speed is selected.
P3-09: Time from stop to rated speed
P3-10: Time from rated speed to stop
Target speed
Rated speed
Speed up time
P3-09
Speed down
time
P3-10
 Loading...
Loading...

