165
8.3 Communication protocol
When communicating in a MODBUS network, this protocol determines that each controller needs
to know their device address, identify messages sent by address, and decide what actions to take. If a
response is needed, the controller generates the feedback and sends it out using Modbus protocol. In
other networks, messages containing Modbus protocol are converted to frame or packet structure which
can be used in this network. This conversion also extends the method of solving node address, routing
path and error detection according to specific network.
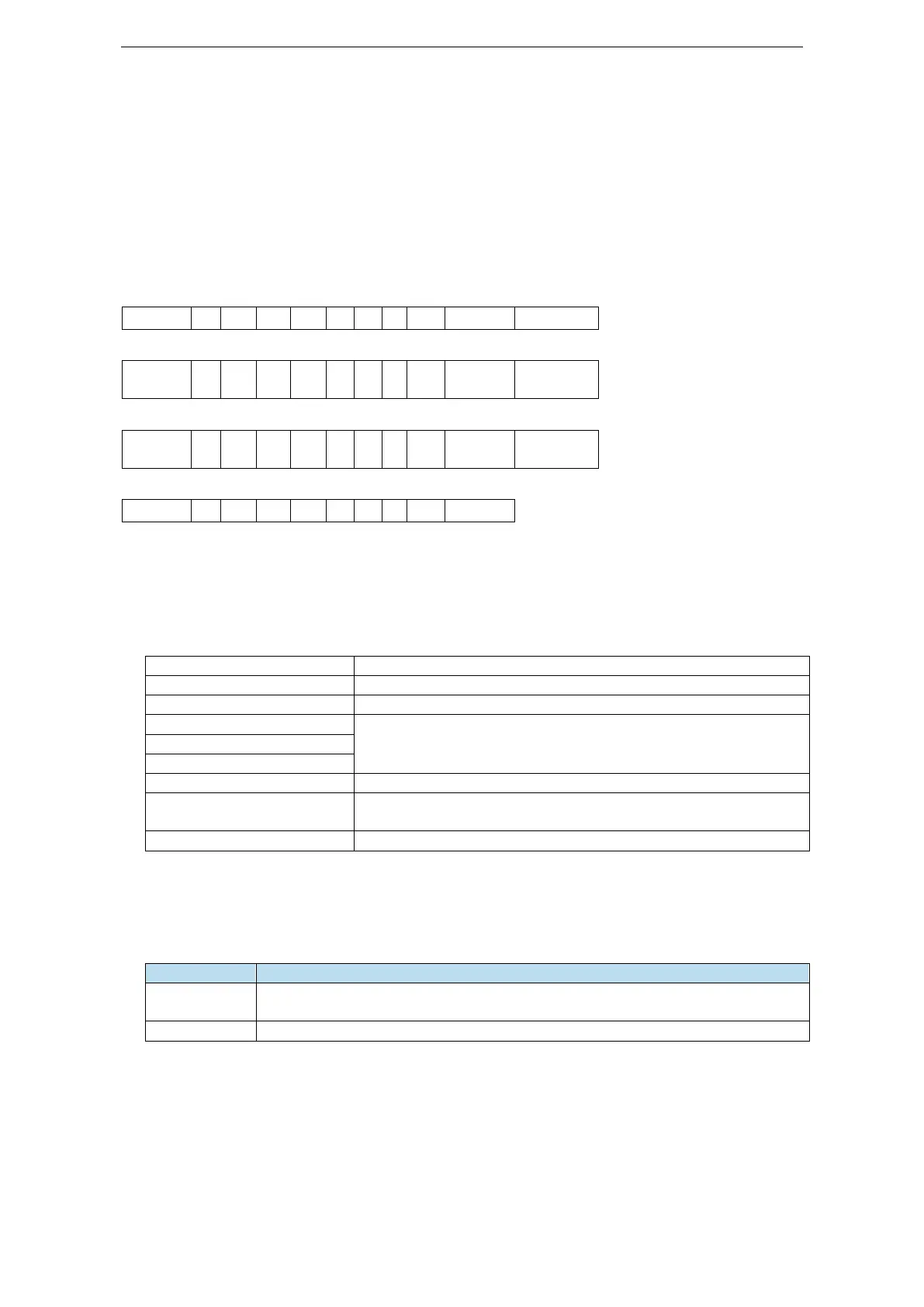
8.3.1 Character structure
(1-8-2 format, no parity)
(1-8-1 format, odd parity)
(1-8-1 format, even parity)
(1-8-1 format, no parity)
The default data format of servo driver is: 1-bit start bit, 8-bit data bit, 1-bit stop bit.
8.3.2 Communication data structure
1. RTU mode:
Keep no input signal greater than or equal to 10ms
Communication address: 8-bit binary address
Function code: 8-bit binary address
N*8-bit data, N<=8, max 8 bytes
16-bit CRC parity code consists of two 8-bit binary
combinations
Keep no input and output signal greater than or equal to 10ms
2. Communication address:
Modbus address is provided in the manual, and the corresponding table of Modbus address is queried in
Appendix 4.
3. Function code and data:
Read out the contents of registers, read out multiple registers, but not more than
31 at a time, and only read the data in the same group at a time
Write the data to register
Function code 03H: read register data
For example: read the U0-05 register address H1005 (bus voltage).