63
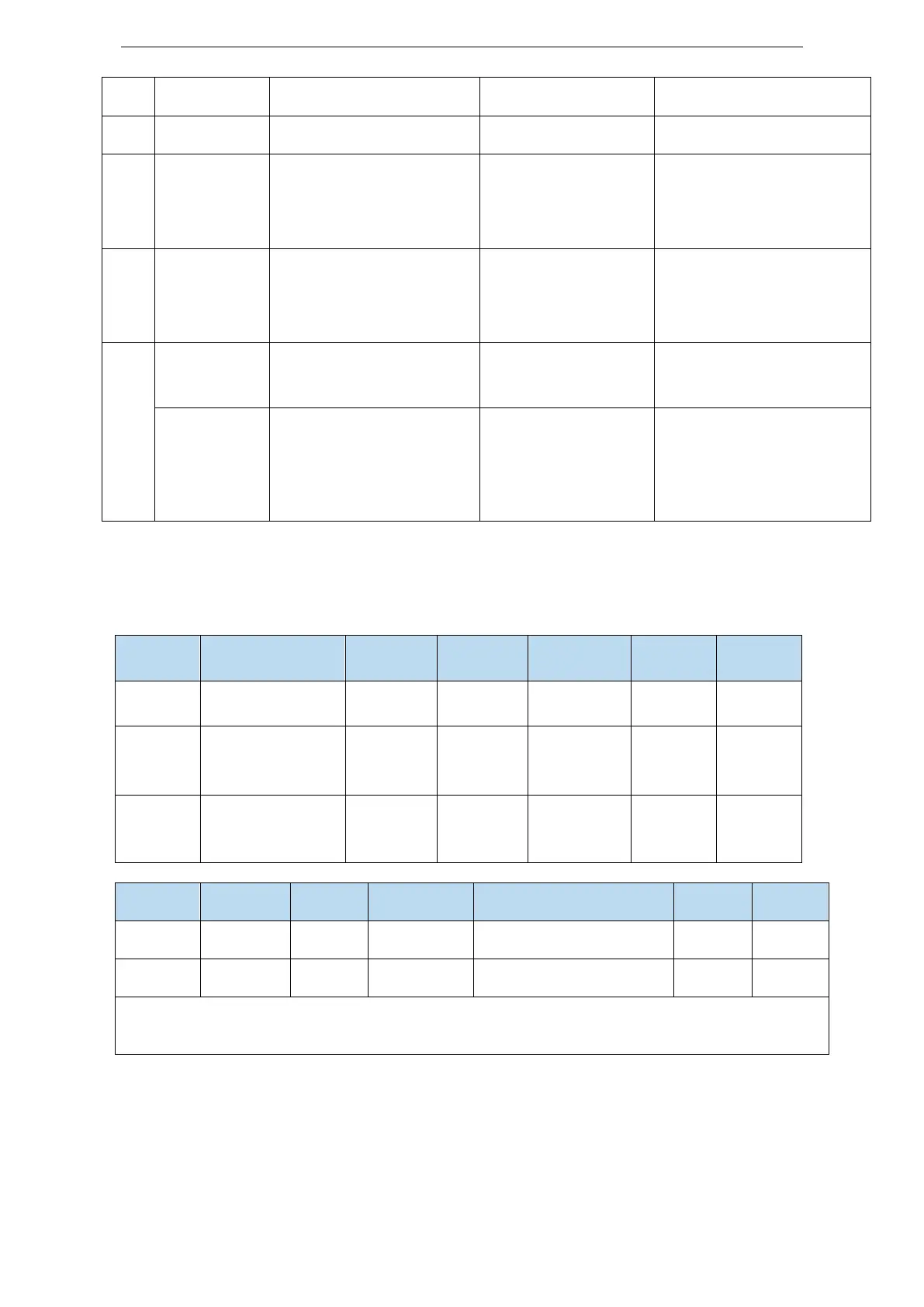
Calculate the
command
amount of 1
revolution of
load shaft
Calculate the
pulse number
m of one
revolution of
motor shaft
Set pulses per
rotation
P0-11/P0-12
Set electronic
gear ratio
(P0-13/P0-14)/
(P0-92~95)
After reduction
P0-13=8192
P0-14=375
After reduction
P0-13=8192
P0-14=75
After reduction
P0-13=65536 P0-14=3925
Conver to second gear ratio
P0-92=5536 P0-93=6
P0-94=3925 P0-95=0
5.3.1.2 Positioning completion signal (/COIN, /COIN_HD)
In position control, the signal indicating the completion of servo motor positioning is used when the
command controller needs to complete positioning confirmation.
Related parameters
Positioning
completion width
Positioning
completion
detection mode
Positioning
completion hold
time
Positioning complete
holding
Positioning complete
output
Refer to section 3.2.2 for hardware wiring details.
If it is necessary to output signal from SO2, P5-37 and P5-38 are set to n.0002/0012. Note that an SO
terminal can only be used as a signal function.
1. Conditions for positioning completion signal output
(1) /COIN-HD signal output conditions
When the positioning completion detection mode P5-01 is set to 3, the positioning completion
holding /COIN-HD signal can be output. When the /COIN signal holds P5-02 time, the COIN-HD
signal can be output.
(2) /COIN signal output conditions
According to the positioning completion detection mode set in P5-01, output positioning
 Loading...
Loading...

