Functional description
4-6 3HDA000057A8519-001 TCP gauging (BullsEye
®
)
Assembly instructions
4.6.2 TCP deviation
Component programming is normally undertaken with an adjusted TCP. The adjusted TCP may
deviate from the actual TCP due to faults in operating sequence.
TCP deviations may have the following causes:
– collision with a component clamp,
– no wire free-burn at the seam end
– adjustable torch holder,
– contact tube wear or highly modified pre-dressing of the welding wire.
The consequence is seam displacements in the components. To correct the seam positions the
TCP must be re-adjusted.
There are various options for this:
4.6.2.1 Manual TCP adjusting method
• Manual alignment in a mechanical torch gauge.
• Manual alignment via two adjusting tips.
• Manual gauging, using programming device.
Further information on manual gauging can be found in the user manual on robot control.
4.6.2.2 Program correct by TCP calibration
• Automatic re-adjustment of the welding wire in a measuring beam.
• Motion program for the robot as software module.
If a position is saved, this is always done using the current tool and taking account of the current
axial angle. These angles are always run in the program sequence.
If the tool center point (TCP) is no longer in the defined position due to a change, the welded seam
is away by the dimensional deviation of the write electrode tip from the defined TCP. This is shown
by Figure 4-5.
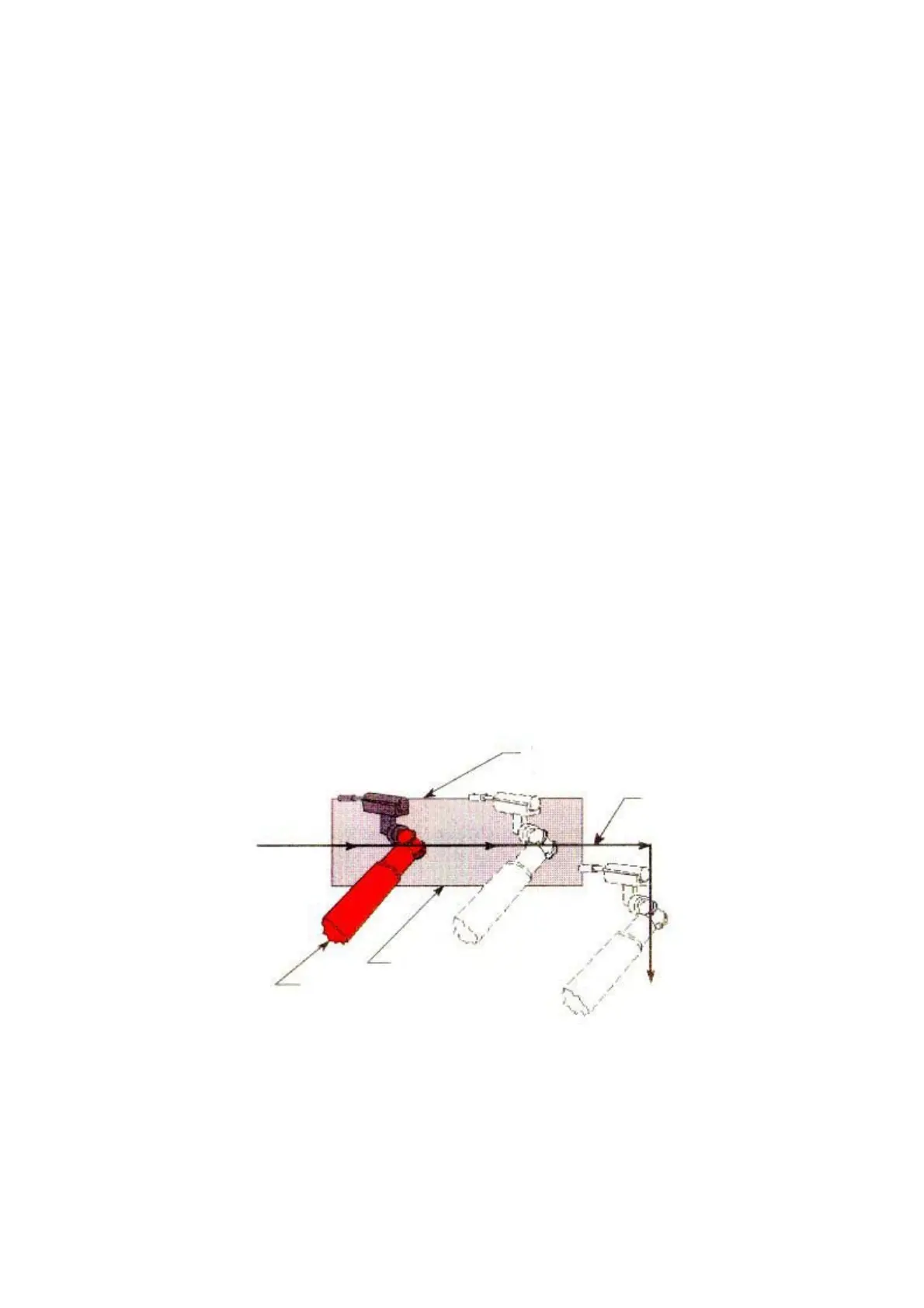
Figure 4-4 Robot and torch motion with correct TCP
Path of the welding torch
(trjectory correct)
Path of the robot
Workpiece
Robot arm
 Loading...
Loading...







