Asynchronous motors - Special functions
Function description 13
Version: 1.5
3.2.1 Functionality from firmware v2.03
Mode of functioning of the breakdown protection controller
The breakdown protection controller attempts to avoid the impermissible range (actual current value
I
max
in %). This is defined in advance in parameter P-0-0115 (ASM: stall protection loop, torque limit value). If
a machining procedure exceeds the I
max
value, the servo drive reduces the set speed (reduction to ≤ 0 is
possible). The mode of functioning is illustrated in detail in the following practical examples 1 and 2. The
procedure concerned is always a machining procedure on a milling machine. A tool penetrates solid material
on reaching the speed setpoint:
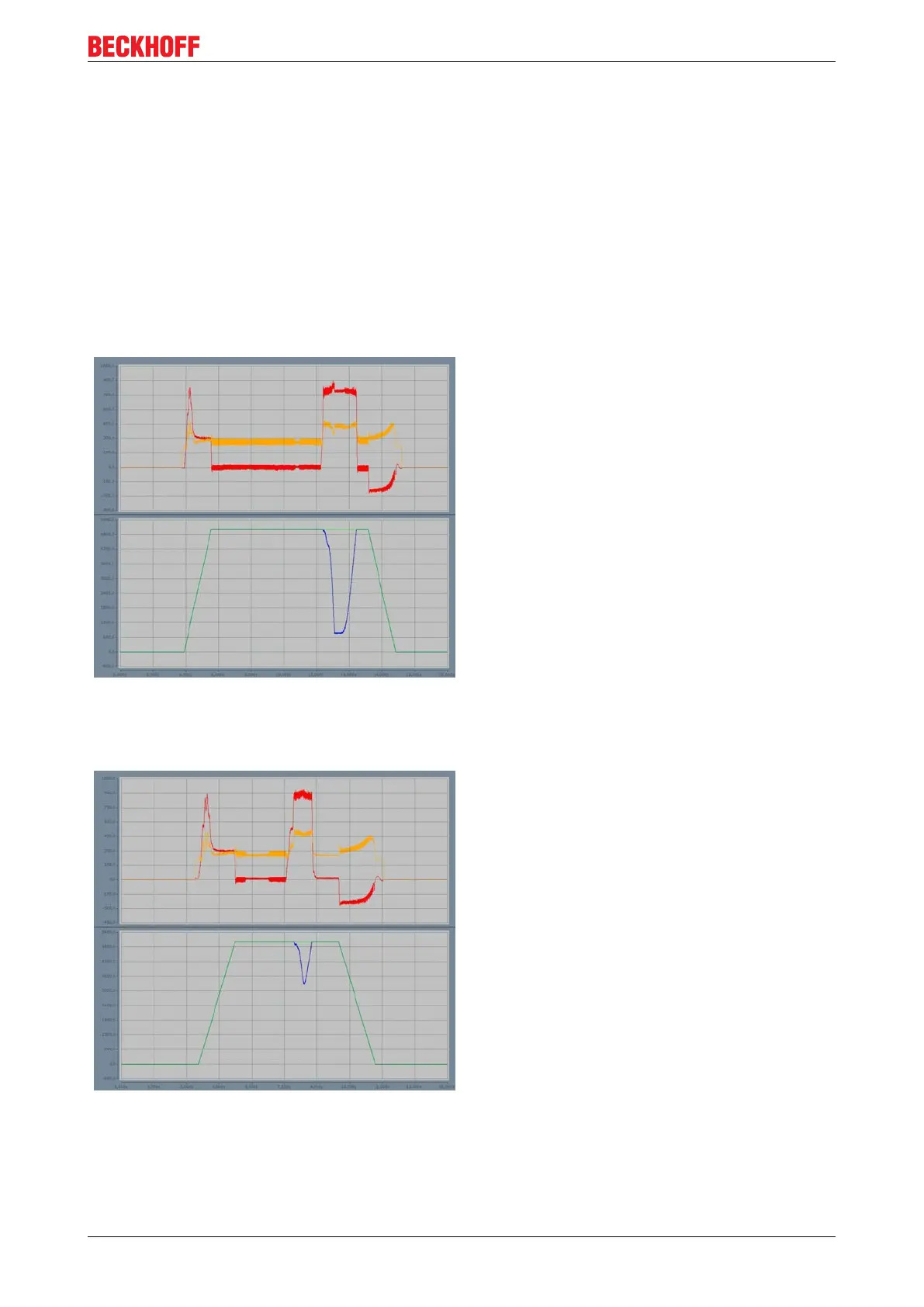
Practical example 1
Machining procedure with an actual current value I
max
of 90%
The value of the breakdown protection controller is
set to 90% in example 1. As the tool penetrates the
solid material, you can see by the blue characteristic
curve that the speed drops dramatically at this point.
Result:
The limitation of the current to 90% by the breakdown
protection controller is therefore insufficient to
maintain the set speed.
Practical example 2
Machining procedure with an actual current value I
max
of 100%
The value of the breakdown protection controller is
set to 100% in example 2. As the tool penetrates the
solid material, you can see by the blue characteristic
curve that more current is available at this point and
that the speed does not drop as dramatically as in
example 1.
Result:
The consequence of the limitation of the current to
100% by the breakdown protection controller is that
the set speed can be maintained better.
Key:
- Green characteristic curve: Set speed
- Blue characteristic curve: Actual speed
- Red characteristic curve: Active current (maps the torque)
- Yellow characteristic curve: Reactive current (maps the magnetization)

 Loading...
Loading...



