Asynchronous motors - Special functions
Function description14
Version: 1.5
3.2.2 Configuration
Note
Joint operation of the breakdown protection controller and the acceleration
controller!
To use the breakdown protection controller and the acceleration controller together, the two
IDNs P-0-0115 and P-0-0112 should have different values.
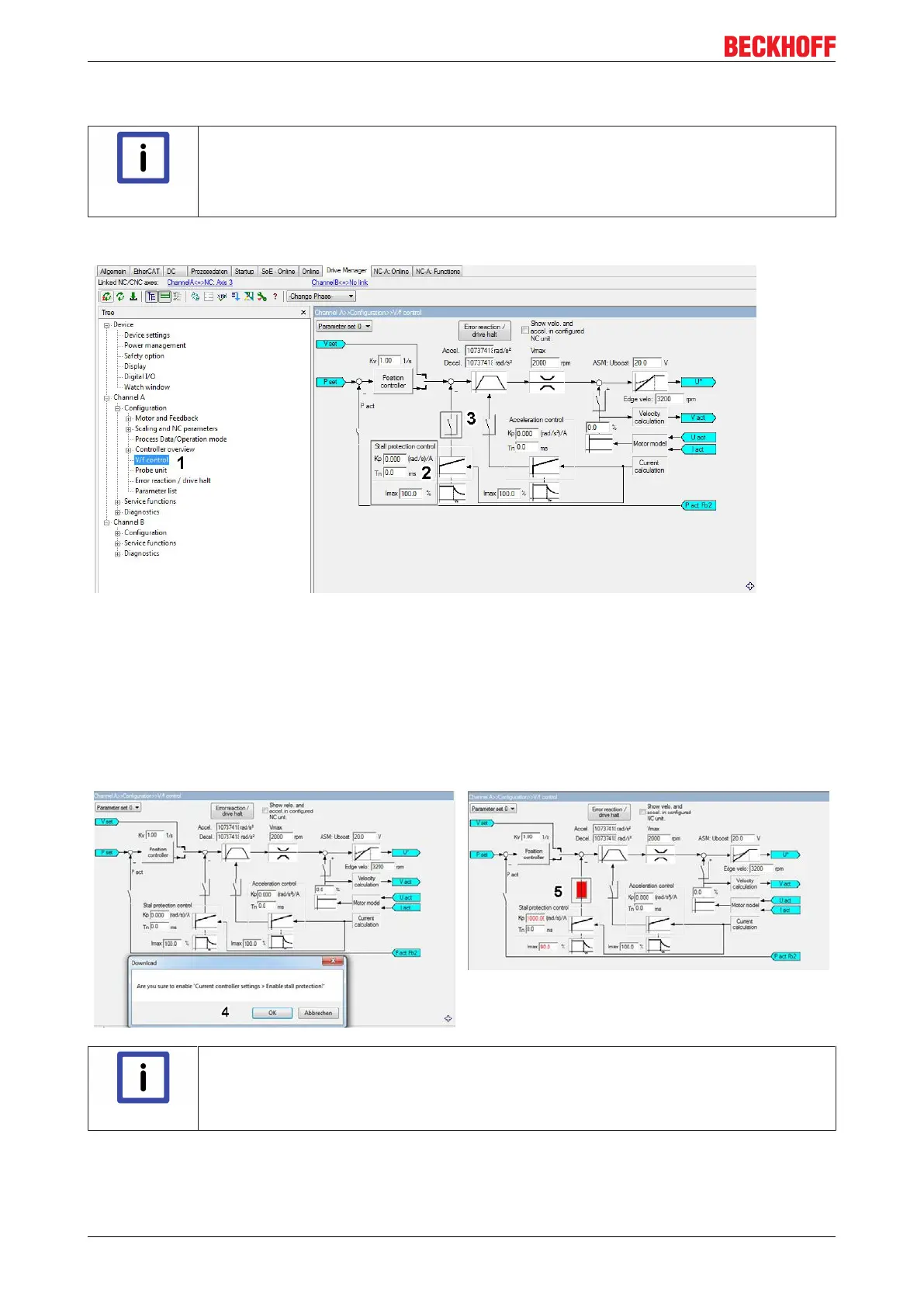
Activation and setting of the breakdown protection controller properties
To activate the control structure of the breakdown protection controller [item 3], go in the Drive Manager to
Channel A → Configuration → Controller overview → V/f control [item 1].
The breakdown protection controller is parameterized via the Kp and I
max
values [item 2].
Confirmation of the settings made Conclusion of the configuration
After actuating the breakdown protection controller
button, a pop-up window appears [item 4] in which
you have to confirm the activation of the current
controller settings once again.
The breakdown protection controller is now activated.
The red coloring [item 5] indicates that the project is
not yet online. To set the breakdown protection
controller to active, you have to activate the TwinCAT
project.
Note
Value range of Kp and Imax:
The values for the gain factor K
p
and the actual current value I
max
must be set in the Stall
protection control settings [item 2].