Modulo
Function description50
Version: 1.5
11 Modulo
In a rotary multi-turn-feedback system the axis position may be difficult to determine once the maximum
speed has been reached (overflow) and the machine is switched off and restarted. This problem can be
avoided via the controller, although the solution is rather complex and requires a UPS that enables important
data to be saved after a power failure. The modulo function of the AX5000 replaces complex programming of
the controller with a simple parameterization in the AX5000.
Note
Basis of the position control in the servo drive
Without activation of the modulo function, the servo drive always outputs the absolute posi-
tion of the encoder, including the problem of overflow. If the modulo function is activated
the servo drive always outputs the position of the application, without overrun problems.
This application position is generally output for all position data. The servo drive also ex-
pects the setpoint values from the controller in modulo format.
Note
Modulo reference values
S-0-0047; S-0-0048; S-0-0051; S-0-0053; S-0-0076; S-0-0091; S-0-0103; S-0-0131;
S-0-0189; P-0-0010; P-0-0159; P-0-0270; P-0-0277; P-0-0279; P-0-0554
Functionality up to firmware v2.06
The modulo function was implemented in v2.06 and is usable with the exception of operation with a prime
number gear unit.
Functionality from firmware v2.10
From this version, operation with a primary number gear unit is also possible.
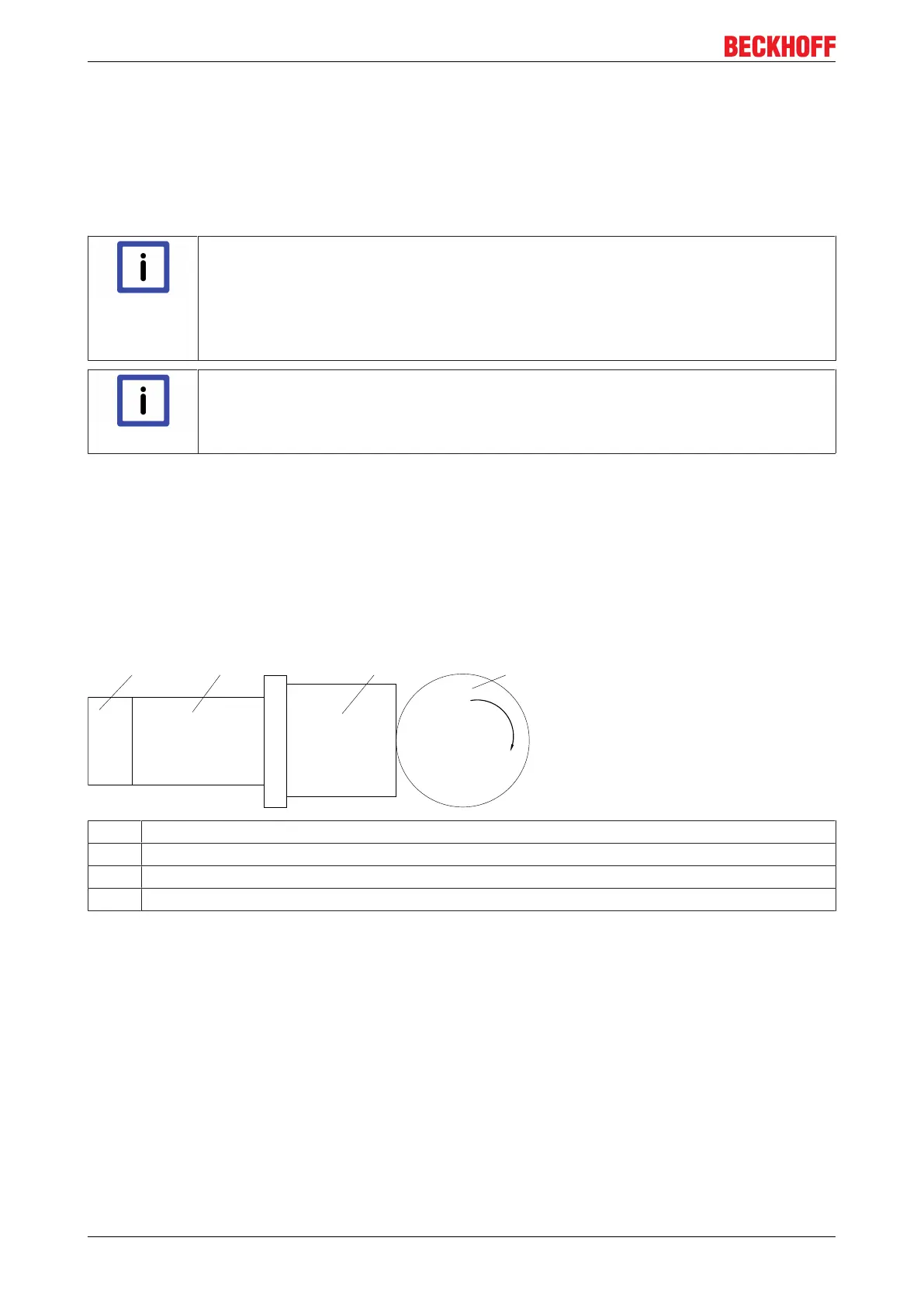
Typical modulo application:
1 Multi-turn feedback system
2 Motor
3 Transmission (gear unit)
4 Application requires absolute position (e.g. turntable)
11.1 Operation without modulo (application with 1:5 gear
unit)
In the example below, a multi-turn absolute value feedback is used that has 4096 revolutions and a
transmission ratio of 1:5. If the maximum encoder position at 4096 revolutions is exceeded, the encoder
begins to count from zero again. It is therefore no longer possible to tell from the feedback position that 4096
revolutions have already taken place. Since a gear unit with a transmission ratio of 1:5 is used in this
example and since 4096 is not divisible by 5 without a remainder, the problem described below results. In
practice this means that, up to 4096 revolutions, the correct application position can be calculated from the
feedback position without further information. After the overwriting of the feedback overrun, this is no longer
possible without knowing the overrun that has taken place. This behavior is explained below: The first
switch-off point is at 12.5 motor revolutions or 2 application revolutions + 180°. The feedback provides the
value correctly after switching on again. The second switch-off point is at 4103 (4096+7) motor revolutions or
820 application revolutions + 216°. Due to the overrun at 4096 revolutions, the feedback system has not

 Loading...
Loading...



